A continuació sexpliquen totes les opcions disponibles del programa de control i per a que serveixen cadascuna.
Una vegada sexecuta el programa, a la primera finestra que apareix,
Figura
1, lusuari pot accedir als diferents menús. Aquests són:
- File: en aquest menú lusuari podrà carregar i guardar
els diferents arxius de configuració dels equips i de calibració.
En el moment dentrar en el programa es carreguen els fitxers que es van
utilitzar la última vegada.
- Configuration: des daquest menú es pot accedir a les diferents
finestres de configuració. Aquestes es comenten a continuació.
- Language: lusuari pot especificar lidioma amb el que vol treballar:
anglès, català o castellà.
- Help: lajuda.
Figura 1
- Calibration:
En aquesta finestra, Figura 2, lusuari pot especificar:
- Les dimensions del terreny
de joc*.
- El tamany dels robots
oponents*.
- Especificar si es vol
utilitzar només una de les dues parts del camp. Si es clicka sobre
el botó 2x1 sactiva lopció i permet indicar en quina part
del camp (Est o Oest) es jugarà. En el cas de que
es jugui en la part Oest també shaurà despecificar
la distància (en mm.) que hi ha entre el mig del camp i el límit
de la línia dreta del camp petit, com es mostra en el següent
esquema:

Una vegada configurat tot al clickar sobre el botó Update es dibuixa lesquema del camp proporcional a las mides.

Figura 2
- Local / Remote:
En aquesta finestra, Figura 3, lusuari pot especificar les
direccions TCP/IP dels ordinadors servidors dels programes de visió
i comunicació (la connexió amb aquests es realitza a través
de Sockets).
En el cas de seleccionar la casella Remote, vol dir que el servidor
es troba en un ordinador remot i per tant shaurà despecificar
la seva direcció. En el cas de que no estigui seleccionada es suposa
que el servidor es troba en el mateix ordinador que en el que sestà
executant el programa de control.
El valor de Port no sha de canviar, excepte si es canvia també
en el programa servidor.
En lapartat Test Panel a la part esquerra es pot especificar
el temps despera/passat per enviar 2 frames seguits al servidor de comunicació.
També es podrà testar la velocitat de la connexió
(part dreta).
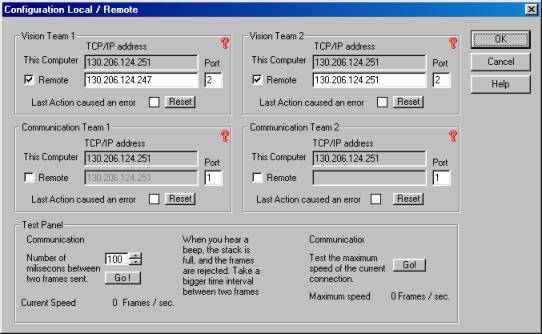
Figura 3
- Monitoring:
En aquesta finestra, Figura 4, lusuari podrà indicar
les variables que es volen guardar en un fitxer *.dat i si es vol visualitzar
els equips per pantalla.
Si es selecciona Monitor Visual el programa mostrarà
el moviment dels robots i de la pilota en lesquema del camp que hi ha
a la finestra Game Operation.
Si es selecciona Monitor File (Team 1), lusuari indica en quin
fitxer es volen guardar les variables dels robots de lequip 1.
I en el cas de Monitor File (Team 2), serà com lanterior
però per lequip 2.
En lapartat Monitored Items, lusuari especifica quines variables
vol que es guardin en el fitxer de cada equip. Aquestes poden ser:
- Number Player: número de jugador, sempre es guarda ja que
tota la informació dels robots dun mateix equip es guarda al mateix
fitxer.
- Image: número dimatge, donada pel sistema de visió
(0-49).
- Time: temps, en mil·lisegons, passat des de linici del
joc.
- x, y, angle: posició i angle del robot.
- Comm: última comanda del sistema de comunicació.
- Agent: última comanda de lagent.
- Supervision: última comanda del supervisor.
Lobjectiu daquest fitxer és poder reproduir els partits.
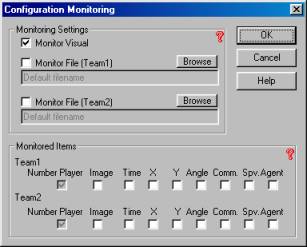
Figura 4
- Team Settings:
En aquesta finestra, Figura 5, lusuari pot especificar si vol
jugar amb dos equips a la vegada.
Si es selecciona Play with two teams, lusuari podrà
especificar el nom i el color del segon equip. També tots els controls
que afectin a lequip 2 de la finestra Game Operation, shabilitaran
per que puguin ser modificats.
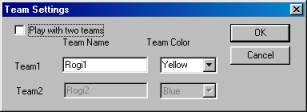
Figura 5
- Game Operation:
Aquesta finestra, Figura 6, està estructurada en diferents
parts:
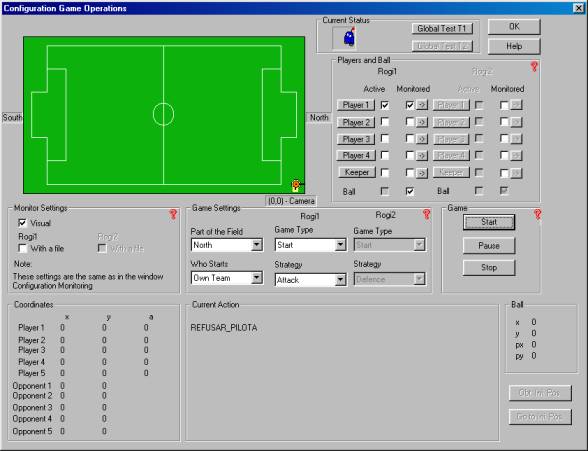
Figura 6
-
Players
and Ball: en aquesta part lusuari pot indicar pels dos equips, quins
robots estan actius (Active) i si vol que siguin visualitzats (Monitored),
en pantalla i en el fitxer en cas destar seleccionada lopció.
També pot especificar si vol que es mostri la pilota.
- Monitor Settings: en aquest apartat, com en la finestra Monitored,
es pot especificar si es vol visualitzar els equips per pantalla i si es
volen guardar les variables, que estiguin seleccionades, en un fitxer.
- Game Settings: en aquesta part es pot indicar:
· En quina part del camp juga lequip propi (o lequip 1 en cas
destar jugant amb els 2 equips) (Part of the field) -> North
o South.
· Qui comença el partit (Who Starts) -> Own Team
o Opponent Team.
· El tipus de joc a realitzar per cada equip (Game Type)
-> Start, Penalty Kick, Kick Off o Goal Kick.
En el cas de seleccionar una daquestes opcions, a excepció de Start,
es mostrarà la finestra Choose a Player (Figura 7),
on es podrà especificar el robot que realitzarà lacció
(només es pot seleccionar un robot actiu).

Figura 7
· Lestratègia per cada equip (Strategy) -> Attack
o
Defence.
- Game: amb els tres botons que hi ha es pot iniciar (Start),
parar (Stop) o deixar en pausa (Pause) el joc.
- Coordinates: en aquesta secció es mostren les coordenades
de cada robot i el seu angle, en el cas de lequip contrari no es mostra
langle.
- Current Action: aquí es mostren les accions que realitza
cada robot.
- Ball: es mostren les coordenades de la pilota actuals i dintre
d1 segon.
La resta dels botons de la finestra són:
- Obt Ini Pos: al clickar apareix una nova finestra, Obtain Position
of Robots, que permet capturar les posicions inicials dels
robots i guardar-les en un fitxer.
- Go to Ini Pos: al clickar es mostra un missatge per pantalla que
preguntarà si es vol carregar dun fitxer les posicions inicials
dels robots i posicionar-los. En el cas destar jugant amb 2 equips es
mostrarà 1 missatge per cada equip.
- Global Test T1: al clickar apareix una finestra, Global Test,
que permet realitzar els tests globals per lequip 1.
- Global Test T2: com en el cas anterior, però per lequip
2.
- Player 1...5: al clickar en aquest botó apareix una finestra,
Robot Settings, on es pot configurar el robot
- Obtain Position of Robots:
En aquesta finestra, Figura 8, lusuari pot capturar les posicions
dels robots i guardar-les en un fitxer.
Al clickar sobre el botó Capture Pos es capturaran les
posicions dels robots i es mostren per pantalla (en el cas de que no estigui
actiu es mostraran i guardaran els valors x=1, y=1 i angle=-1), una vegada
capturades shabilita el botó Save que obrirà un diàleg
per especificar en quin fitxer es vol guardar les posicions.
En el cas destar jugant amb dos equips, mitjançant el Combo
Box de la dreta es podrà seleccionar lequip.
En el cas de sortir daquesta finestra després dhaver capturat
les posicions dun equip i no shagin guardat en un fitxer, es preguntarà
si es volen guardar.
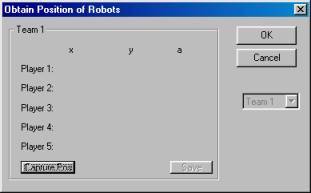
Figura 8
- Global Test:
En aquesta finestra, Figura 9, es podrà especificar el
número de missatges pel test de comunicació i el temps que
es vol que duri el test de visió. Els botons Comunication Test
i Vision Test sencarreguen diniciar el test de comunicació
i visió. Els botons Agent, Control i Supervision
Test obren la finestra, amb el mateix nom, on es pot especificar les
condicions del test dagent, control i supervisió.
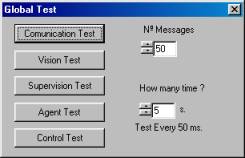
Figura 9
- Agent, Control i Supervision Test:
Aquesta finestra, Figura 10, és la mateixa pel test dagent,
control i supervisió.
Depenent del test es pot especificar (sha de tenir en compte que pels
3 tests les posicions inicials, cercles grocs, es capturen a partir de
la carnera de visió):
- Test dagent: en aquest cas únicament es pot clickar en
el botó Decision per comprovar la decisió presa per
cada robot.
- Test de control: en aquest cas es podrà indicar la posició
final del robot (cercles vermells) mitjançant el botó ->,
també amb el botó Obstacles es podrà indicar
la posició dobstacles (cercles blaus). Una vegada sha indicat
la posició final dels robots al clickar en el botó Start
el robot començarà a anar a la posició final i sanirà
mostrant per pantalla la velocitat.
- Test de supervisió: en aquest cas es podrà indicar
la posició final i la dels obstacles. En aquest cas, al clickar
en el botó Trajectory, es podrà especificar la trajectòria
(cercles liles) que ha de seguir el robot per arribar a la posició
final, una vegada sha clickat en el botó Start el robot
es mourà cap a la posició final passant pels punts indicats,
mitjançant cercles blau clar sindicarà la trajectòria
que ha seguit el robot.

Figura 10
- Robot Settings:
En aquesta finestra, Figura 11, es pot configurar els Timers
de lagent, supervisor, comunicació i visió, el número
de robot, el rol, realitzar el test individual i activar/ desactivar lagent
i el supervisor.
També es mostra lestat actual del robot (quins Timers
estan en funcionament, si el sistema de visió i comunicació
estan activats i si el robot està actiu).
Els botons de test tenen el mateix funcionament que en el cas del test
global, a excepció del test de comunicació, que en aquest
cas es pot especificar si el test serà continu o no (una vegada
finalitzat el número especificat de missatges es torna a iniciar
el test).
Quan es clicka sobre el botó Test Robot, apareix una
nova finestra, Test Robot, on es pot realitzar una sèrie
de proves de posició i velocitats amb el robot.
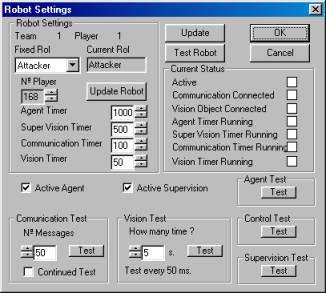
Figura 11
- Test Robot:
En aquesta finestra, Figura 12, es pot crear el frame que senvia
al servidor de comunicació, els paràmetres que es poden configurar
són:
- F: pot ser:
· 128, per indicar que els tres paràmetres següents
són les coordenades x, y i langle actual del robot.
· 192, per indicar que s'envien les coordenades x, y i langle a
on es vol que vagi el robot
· 64, per indicar la velocitat lineal, angular a la que es desitja
que vagi el robot i el temps que ha de durar lacció.
- V: si F és 128, serà la coordenada x actual
del robot; si F és 192, la coordenada x on es desitja que
vagi el robot; i si és 64, la velocitat lineal.
- W: si F és 128, serà la coordenada y actual
del robot; si F és 192, la coordenada y on es desitja que
vagi el robot; i si és 64, la velocitat angular.
- T: si F és 128, serà lorientació
actual del robot; si F és 192, lorientació desitjada
pel robot; i si és 64, és un número que multiplicat
per 32 ms. dona el temps que el robot mantindrà les velocitats.
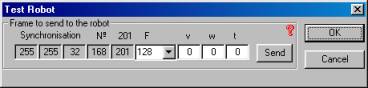
Figura 12