| Introducció
als agents i sistemes inte·ligents |
Josep Lluís de la Rosa
peplluis@eia.udg.es
1. Objetivos
del curso
Estamos ante un nuevo método de enseñanza
que puede tener dificultades de asimilarse por parte tanto del profesorado
como del alumnado. Estamos en las puertas de un campus virtual donde el
trabajo
cooperativo se implementará mediante la mensajería electrónica
que permitirá el trabajo coordinado alumno-profesor mejor que en
universidades presenciales, si bien en las áreas tecnológicas
todavía queda trabajo por conseguir el laboratorio virtual,
el cual nadie todavía ha bien concebido. No es trivial como la cooperación
de científicos puede funcionar sobre mensajería y web en
internet.
Los cursos doctorales están orientados a la
iniciación en investigación de futuros investigadores. Por
lo tanto se insistirá mucho en el método de trabajo, el método
científico, necesario para proceder a una investigación
y generar conocimiento.
Se dará mucha importancia a la lectura de
artículos, puesto que requiere de técnicas, paciencia y análisis
orientados a captar la novedad de los artículos dentro de un espíritu
crítico y analítico. La lectura de bibliografía es
esencial en la formación doctoral puesto que la lectura de artículos
científicos es más difícil que los libros especializados
por contener conocimiento muy especializado y a menudo poco leíble
para los no iniciados. En cambio debe ser minuciosamente leída y
referenciada, en caso de ser utilizada de forma efectiva, en cada uno de
los publicaciones que haga el investigador en formación.
2. Saber leer
bibliografía científica.
Para leer bibliografía científica
nos centraremos en la lectura de revistas científicas. Para todo
trabajo de investigación la bibliografía debe ser abundante,
variada y focalizada
y por ello debe tenerse algún hábito
de lectura sistemático para la lectura científica.
-
La selección de los artículos de revista
se hace a menudo por título y resumen (abstract).
-
Al leer cada artículo podemos hacer
-
Primero, leer el abstract (resumen) y nos hacemos
un esquema de la problemática que se quiere abordar y una ligera
idea del método aplicado
-
Cuando hemos entendido el resumen entonces leemos directamente
las conclusiones (conclusions), puesto que éstas a menudo
son como un resumen ampliado, con mayor concreción de los resultados
presentado en el artículo y con una propuesta de trabajo pendiente
y de futuro (future work).
-
Una vez leídos el resumen y las conclusiones,
y seguimos pensando que es artículo de nuestro interés, procedemos
a una lectura de la introducción (introduction). La introducción
habitualmente introduce la nomenclatura que se va a utilizar en
el artículo, así como una enumeración de trabajos
previos y problemas que motivan el presente trabajo. En este paso verificamos
las referencias bibliográficas que nos ayudan a la comprensión
del tema del artículo.
-
A continuación leemos el cuerpo del artículo,
consultando o verificando si es necesario las referencias bibliográficas.
-
Para un investigador en formación la lectura
superficial
de un artículo puede ocupar 1 día, y una lectura profunda
de una a dos semanas. Para un investigador introducido en la temática
o senior la superficial puede llevarle un par de horas así
como la profunda igualmente hasta una semana, incluso más.
-
Por qué se toma tanto tiempo en una lectura profunda?
Porque la lectura profunda requiere de comprender los ejemplos que se proponen
en el artículo, reproducir algunos de los experimentos que se incluyen,
compararlos con resultados que tenemos o que conocemos e incluir el estudio
de las referencias bibliográficas propuestas en el artículo.
Los indicios de calidad del trabajo a menudo
viene corroborado por, además de ser original y significativo, por
tener resultados repetibles (base del método científico)
y estar basados en sus referencias bibliográficas por una combinación
acertada de revistas de prestigio (y accesibles mundialmente) con congresos
que suelen ser de difusión más limitada (aunque con las modernas
técnicas de web y CD se ha mejorado muchísimo).
Los index citation de las revistas son índices
de impacto que reflejan el número de referencias que han recibido
los artículos de dichas revistas desde otras publicaciones. A mayor
citación se considera mayor impacto y por tanto mayor interés
motivado por la calidad de la producción científica. Los
científicos prefieren publicar en las revistas con mejores índices,
y los artículos tienden a referenciar los trabajos publicados en
revistas con mejores índices.
3. El
método científico.
El método científico se basa
en la repetitividad de los experimentos obteniendo los mismos resultados
de investigación de forma sistemática.
-
La publicación de la investigación se
centra en métodos y resultados.
-
Dichos resultados de investigación son utilizados
por otros investigadores y citados en referencias bibliográficas.
-
El análisis y la crítica son buenos en
el método científico. Todo debe ser argumentable sobre el
método científico.
-
El método científico está orientado
a la mejora de técnicas y ciencia anteriores: aumentar el conocimiento.
4. La lengua
inglesa.
Sobre la lengua científica, actualmente
predomina la inglesa, con lo que los futuros doctores deben ejercitarse
en la lectura de artículos científicos en dicha lengua para
familiarizarse con los términos, con la ayuda de los investigadores
avanzados que les explicarán en su lengua vernácula.
Es importante producir ciencia en nuestra lengua
para evitar su empobrecimiento. Pero al ya existir numerosa bibliografía
en inglés hay que saber leer revistas y libros científicos
en dicho idioma.
5. Método
de evaluación.
El método de evaluación se
basará en una apreciación del nivel de interacción
conseguido entre alumno e investigador, apreciado sobre los comentarios
de trabajos que se van a ir entregando a lo largo del curso. En el caso
concreto de esta asignatura se procederá a desarrollar agentes en
el JAVASOCCER para apreciar el nivel de dominio en el diseño de
sistemas inteligentes que el estudiante haya conseguido.
La valoración final será (no aprobado,
aprobado, notable, o sobresaliente.)
6. Qué
es inteligencia?
6.1Definición
de trabajo de la IA.
Cual de todas estas características por
ella sola se podría llamar "inteligencia"?
-
Razonamiento
-
Deducción
-
Analogía
-
Generalidad
-
Por defecto
-
Temporal
-
Por casos
-
Ambigüedad
-
Incertidumbre
-
Imprecisión
-
Incompletitud
-
Vaguedad
-
Incoherencia
-
Lógica
-
Aprendizaje (Adaptación)
-
Emulación del Proceso Humano
Inteligente.
-
Problem Solving.
-
Simbólico
-
Percepción
-
Lenguaje Natural.
-
Heurística.
-
Cooperación.
-
Consciencia.
-
Sentido Común!
Una posible definición de trabajo que particularmente
me agrada es que todo sistema inteligente es aquel que es capaz de resolver
de forma autónoma problemas en dominios poco estructurados.
El enfoque adecuado para hacer Ingeniería del
Conocimiento es desarrollar "sistemas inteligentes" que serían programas
que contienen una o varias de las características enumeradas aquí
arriba para resolver problemas. Estos programas contienen "conocimiento"
y por ésto se ha de explicar qué son los esquemas de representación
de conocimiento.
6.2 Esquemas de Representación
del Conocimiento.
Cuando queremos extraer el conocimiento del ingeniero
experto (imaginemos un médico) lo podemos hacer a base de preguntas
del tipo "Qué pasa si es presenta tal síntoma o indicio ?",
"Que relación hay entre síntomas ?", "Si pasa esto que puedo
hacer acto seguido ?", "Si la temperatura
del paciente es pequeña y está
sudando
entonces deducir algo". Todas estas relaciones de evidencias, causas y
efectos, para llegar al diagnóstico, se pueden codificar en forma
de reglas. Las reglas son un tipo de esquema de representación
del conocimiento del tipo lógica y que pueden ser encadenadas
con un sistema deductivo. Los síntomas se pueden representar en
forma de símbolos tales como temperatura
y pequeña, se pueden cualificar
mediante términos simbólicos, que son otro tipo de esquema
de representación de conocimiento del tipo simbólico.
El ordenador ha de poder utilizar un sistema informático que entienda
el esquema de representación de conocimiento elegido para poder
hacer razonamientos análogos a los que haría el experto humano
que ha explicado su conocimiento, y que una persona llamada ingeniero
de
conocimiento, normalmente un informático, se ha d'encargar de
codificar.
 Cada esquema de representación de conocimiento
se especializa en un tipo de característica de la IA de las que
hemos descrito la lista de antes. No existe el esquema de representación
de conocimiento global que pueda combinar todas las características
aisladas de la IA y, si existiese, no se conoce el motor de inferencia
que se encargaría de ejecutarlo de forma que se comportase como
un sistema auténticamente inteligente.
Cada esquema de representación de conocimiento
se especializa en un tipo de característica de la IA de las que
hemos descrito la lista de antes. No existe el esquema de representación
de conocimiento global que pueda combinar todas las características
aisladas de la IA y, si existiese, no se conoce el motor de inferencia
que se encargaría de ejecutarlo de forma que se comportase como
un sistema auténticamente inteligente.
Qué es la Inteligencia Artificial (IA)? La
emulació de la forma de trabajar humana es la inspiración
primera que la IA intenta formalizar.
7. Motivación
de la investigación en inteligencia artificial distribuida.
 Las
nuevas tendencias
Las
nuevas tendencias
Las capacidades de aprendizaje de las redes neuronales
dan una puerta abierta a representar el conocimiento de los expertos en
forma de ejemplos y de ensayo y error. Los sistemas
expertos con fuzzy representan el conocimiento
abstracto, lógico y aproximado de los expertos. Los agentes
(la IA distribuida) como sistemas distribuidos permiten representar el
know-how (conocimiento) sobre los métodos de cooperación
de un colectivo de expertos. Finalmente, las nuevas técnicas informáticas,
juntamente con el Java (lenguaje orientado
a objetos que trabaja sobre World Wide Web
WWW y Internet) juntamente con sistemas
inteligentes que intenten solucionar la percepción (por ejemplo,
la percepción visual así como la no visual) dan nuevas esperanzas
en la solución del problema de la accesibilidad informática
a las fuentes de información y a las de conocimiento.
Notemos que las nuevas técnicas pueden
tener una gran difusión por mor de internet, el Web y el Java, los
cuales generan muchísimas expectativas de gran alcance general.
En este curso hacemos especial incidencia en los sistemas expertos (SE)
basados en lógica difusa, y agentes (SE cooperantes).

 Grupo
de expertos trabajando de forma cooperativa
Grupo
de expertos trabajando de forma cooperativa
Aplicaciones
Aplicaciones a entornos distribuidos tanto
espacialmente (dispersión geográfica) como funcionalmente
(dispersión de expecialistas) como temporalmente (accesos asíncronos
típicos del web y la telefonía).
Control de tráfico en redes
telefónicas (France Telecom, etc).
Supervisión de transporte
de energía eléctrica (IBERDROLA, etc)
Diseño de circuitos VLSI.
PDA (Personal Assistants).
WEB.
Control de tráfico en aeropuertos.
Aplicaciones médicas al diagnóstico.
Fábricas de fabricación flexible.
Robots autónomos
La investigación en la DAI (Inteligencia Artificial
Distribuida), en particular los agentes, está actualmente en auge
explosivo en número de desarrollos, investigación práctica,
aplicada, publicaciones y congresos.
8. Introducción
intuitiva de agente.
Representación
de Creencias
La creencia se basa en una afirmación
como "yo sé aquello que me has explicado", es decir, que todo sistema
cuando recibe información se construye un mundo que intenta representar
el mundo exterior.
Por ejemplo,
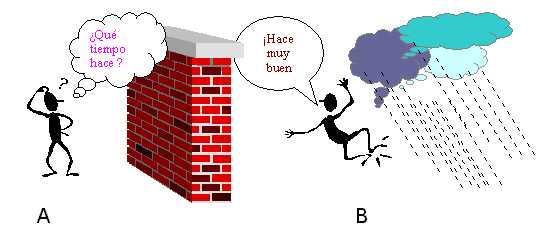
Aquí vemos que A pide una información
sobre el tiempo que hace. El agente A está al interior de la casa
y no tiene ninguna ventana para comprobar el tiempo, entonces tiene que
pedir esta información al agente B. El agente B le puede decir que
hace_buen_tiempo,
o
bien que hace_mal_tiempo.
El agente A, cuando recibe esa información
lo que tiene es una creencia que hace_buen_tiempo.
Entonces este agente, construido como un SE, razona sobre esta creencia
juntament con otras informaciones que contien en su base de conocimiento.
Veamos entonces la diferencia que hay entre hacer una medida o inspección
directa
(de lo que puede ser información o evidencia como, por ejemplo,
medir una temperatura, ponderar el buen tiempo, ver las nubes, etc) y una
creencia.
Podriamos entonces decir, sin ser del todo general,
que las medidas de sensores se podrían considerar
evidencias, y en cambio las informaciones
de otros agentes no se podrían considerar evidencias sinó
creencias.
Desde el punto
de vista de ingeniería del software
Desde el punto de vista de ingeniería del
software se puede considerar que un agente es o bien
un caso especial de objetos o bien un superobjeto.
La evolución en la ingeniería del software
indica que el mayor grado de abstracción en el análisis y
diseño de software produce mejor código informático.
Luego, esta es la expectativa de los lenguajes orientados a agente, que
se puede dar una idea intuitiva mediante la enumeración de la evolución
de los lenguajes de programación, que es la que sigue:
Hardware con lógica cableada.
Hardware con lógica microprogramada (firmware).
Lenguaje binario a mayor nivel que el firmware.
Lenguaje Ensamblador.
Lenguaje científico procedural Fortran,
RPG o declarativo LISP
Lenguaje estructurado Pascal / C
/ COBOL / otros.
Lenguaje orientados a objeto C++
/ Smalltalk / CORBA / JAVA
Lenguaje orientados a agente AGENT0
/ KQML / otros.
En esta evolución ha aumentado continuamente
el nivel de abstracción y declaración de los lenguajes, separándoles
progresivamente del hardware. Los lenguajes agentes se plantean como la
nueva generación de lenguajes.
9. Introducción
a agentes físicos y bibliografía del curso.
Antecedentes
y estado actual de los aspectos científico-técnicos, incluyendo
la bibliografía más relevante.
Este curso de doctorado busca
la motivación en el estudio de agentes físicos. Entendemos
por agente físico un agente software que tiene un fundamento físico,
que a su vez lo entendemos como un sistema dinámico (ya sea mecánico,
eléctrico, electrónico, térmico, químico, como
otro soporte) de variable continua (tiempo y estado continuos) [Asada,
1997]. Dicho fundamento físico está regido por leyes
de control automático (implementadas en la actualidad con la teoría
de sistemas lineales principalmente) supervisado por un autómata
secuencial (implementado en la actualidad con lógica secuencial
o bien con sistemas basados en el conocimiento, como por ejemplo sistemas
expertos), y que se coordina (compite o coopera) con otros sistemas físicos.
Los agentes físicos son excelentemente
representados por robots móviles, especialmente cuando poseen autonomía
suficiente (en decisión y ejecución) y deben desarrollar
tareas que requieran de su cooperación. Esto justifica la coordinación
con otros grupos de investigación cuya motivación sea más
ligada a los aspectos tecnológicos de creación de robots
móviles autónomos, como presentamos en este proyecto. Finalmente,
cuando dichos robots deben desarrollar su actividad en entornos cambiantes
y poco estructurados debido a la presencia de otros robots en el campo
de trabajo o cuando los objetos que deben desplazar no están, por
razones varias, en posiciones prefijadas o conocidas, toda esta complejidad
que aparece en actividades industriales poco convencionales es la que representa
a los agentes físicos de interés en este proyecto.
9.1
La IA distribuida
La inteligencia artificial distribuida
(IAD) es una disciplina dirigida al desarrollo de métodos y técnicas
para la solución de problemas complejos por medio del comportamiento
inteligente de un sistema integrado por unidades llamadas agentes. Podemos
distinguir dos líneas dentro de la IAD, la solución distribuida
de problemas (SDP) y los sistemas multi-agente (SMA). La investigación
dentro de la SMA está dirigida a buscar la solución de un
problema dividiendo el problema entre un número de agentes cooperativos,
y decidiendo cómo se debe compartir el conocimiento de manera que
los agentes puedan trabajar conjuntamente. Los agentes pueden estar distribuidos
desde un punto de vista geográfico, funcional o conceptual. Durante
muchos años ésta ha sido la línea seguida dentro de
la IAD [Durfee et al., 1989].
Por su naturaleza interdisciplinaria la
IAD ha estado influenciada por áreas interesadas en la interacción
entre grupos de individuos inteligentes. Muchas veces en la investigación
sobre SMA el énfasis no se ha puesto en los problemas a resolver
sino en los agentes que se verán implicados en la interacción
que conduce a la solución de los mismos.
Existen distintas definiciones de la noción
de agente dadas por diversos autores (véase [Wooldridge,
1995]), por lo que a continuación damos una lista de las
características más habituales que aparecen en la bibliografía:
Los agentes son entidades que
relacionan percepciones de su entorno con acciones en su entorno, es decir,
son reactivos.
Son objetos computacionales con un grado
variable de autonomía
Los agentes toman iniciativas, es decir,
no actúan simplemente en respuesta a su entorno sino que pueden
actuar en base a unos objetivos propios.
Interactúan y se comunican mediante
un lenguaje de comunicación que incorpora actos de habla (speech
acts) como informar, preguntar, prometer y requerir.
Son racionales, es decir, actúan
de "forma correcta", lo cual se interpreta como que el estado mental del
agente es coherente con su comportamiento.
Estas características de los agentes
pueden sugerir diferentes modelos de SMA, de mayor o menor complejidad.
Por ejemplo, en informática, la idea de agente como un proceso software
que se ejecuta de forma concurrente, que tiene una noción de estado
y es capaz de comunicarse con otros agentes por pase de mensajes, es algo
que se considera como un resultado natural del desarrollo del paradigma
de programación concurrente orientada a objeto. Esta noción
de agente es la que también se usa en la llamada "ingeniería
de software basada en agentes", cuyos productos, llamados "software agents"
o "softbots", son agentes que interaccionan con un entorno software mediante
comandos que usan para obtener información o cambiar el estado del
entorno.
En cambio, dentro de la IA, la noción
de agente parece adecuarse más a un sistema computacional que además
se conceptualiza usando nociones mentales, como pueden ser las nociones
de conocimiento, creencia, intención u obligación. Así
pues, dado que nuestro interés sobre los agentes se centra en el
ámbito de la IA y los robots móviles autónomos y cooperantes,
añadiremos a la lista anterior la siguiente característica:
Los agentes son unidades que
se pueden describir en términos de estados mentales: conocimientos,
intenciones, creencias, deseos, etc...
Finalmente, cuando los agentes son aplicados
en la industria aparece el concepto de agente físico que explicamos
más en detalle en los siguientes apartados.
9.2
Estado Actual en Sistemas Multi-Agente
Para dar una visión más detallada
de cual es el estado actual del tema haremos un repaso de las contribuciones
más destacadas en los cuatro niveles a los que se puede hacer referencia
cuando se trata de construir agentes, esto es: a nivel de teorías
formales, a nivel de arquitecturas, a nivel de lenguajes de programación
y a nivel de aplicaciones [Wooldridge, 95]:
i) Teorías formales
sobre Agentes. Son básicamente especificaciones formales, es decir,
estudios formales acerca de las propiedades de los agentes, su representación
y cómo razonar sobre ellas. La principal línea de investigación
que se ha seguido es la de considerar a los agentes como sistemas intencionales,
atribuyéndoles creencias, deseos y comportamiento racional [Rosenschein,
1986] [Shoham, 1990]. La representación
de objetivos y deseos ha tenido enfoques basados en la semántica
de mundos posibles [Kripke, 1963]. En esta línea, uno de los trabajos
más importantes es el de Cohen y Levesque [Cohen,
1990] sobre la formalización lógica de una teoría
sobre intenciones, definidas a partir de dos primitivas básicas
como son la creencia y los objetivos. Esta lógica ha sido también
usada para análisis de conflictos y cooperación en sistemas
multi-agente así como en resolución de problemas cooperativos.
ii) Arquitecturas de Agente. Representan
el paso de las especificaciones del punto anterior a las implementaciones,
es decir, cómo construir sistemas computacionales reales que den
cuenta de teorías o modelos particulares de agentes. A este respecto
han habido :
Arquitecturas Deliberativas: son
arquitecturas que contienen un modelo simbólico, explícitamente
representado, del entorno, en el cual las decisiones se toman mediante
razonamiento (pseudo-) lógico, basado en manipulaciones simbólicas.
Una arquitectura en esta línea es [Jennings, 1993]. Ésta
es una arquitectura estratificada donde los agentes se dividen en dos partes:
un sistema a nivel de dominio y un sistema de cooperación y control.
El sistema de control se encarga de coordinar las actividades del agente
a nivel de dominio con las de los otros agentes de la comunidad. El sistema
de cooperación especifica cómo el agente ha de interactuar
en el marco de una resolución cooperativa de tareas.
Arquitecturas Reactivas: son arquitecturas
que no incluyen ningún tipo de representación simbólica
del mundo y no usan razonamiento simbólico, y han sido propuestas
como una alternativa para evitar los serios problemas que plantea la IA
simbólica [Steels, 1990; Maes, 1989]. Por ejemplo, Patti Maes ha
desarrollado una arquitectura en la cual un agente se define como un conjunto
de módulos, siendo cada módulo determinado por una serie
de pre y post condiciones y por un nivel de activación, que indica
el grado de relevancia del módulo en una situación particular,
y por tanto el grado en que dicho módulo va a influir en el comportamiento
del agente. Finalmente, dichos módulos se integran en una red de
activación, donde los módulos se interconectan de acuerdo
a sus pre y post condiciones.
iii) Lenguajes de Agentes. Un lenguaje
de agentes es un sistema que permite programar sistemas computacionales,
software o hardware, en términos de algunos conceptos desarrollados
en teorías o modelos formales de agentes. Los predecesores de estos
lenguajes son los lenguajes concurrentes orientados a objeto, tales como
"Actor model" [Hewitt, 1977; Agha, 1986].
El primero que propuso un nuevo paradigma para la programación de
agentes fue Shoham [Shoham, 1990]. La idea
principal es la de programar agentes directamente en términos de
nociones mentalistas e intencionales. Shoham propone un paradigma de programación
orientado a agente basado en tres componentes: un sistema lógico
para definir estados mentales, un lenguaje de programación interpretado,
y un proceso de "agentificación" para compilar programas de agente
en sistemas ejecutables de bajo nivel. Algunos intentos de desarrollar
lenguajes para agentes son Agent0 [Shoham, 1990]
y Concurrent METATEM [Fisher, 1994].
iv) Aplicaciones. Las principales
áreas en las cuales se han aplicado la tecnología de sistemas
multi-agente son
Resolución Cooperativa de Problemas
e Inteligencia Artificial Distribuida: existen algunas aplicaciones
en dominios como gestión de plantas eléctricas, control de
tráfico aéreo, recuperación inteligente de documentos
y gestión de redes de telecomunicación, por ejemplo ARCHON
[Wittig
91; Corera 96; Jennings 96].
Agentes Interfaz: sistemas que emplean
técnicas de inteligencia artificial para proporcionar ayuda a usuarios
de una aplicación determinada. Existen muchas aplicaciones a nivel
de prototipo, por ejemplo el sistema NEWT [Maes, 1994].
Agentes Especializados en Información
y Sistemas de Información Cooperativos: sistemas que tienen
acceso a fuentes de información y que son capaces de sintetizar
y manipular la información obtenida de estas fuentes para dar respuesta
a los requerimientos de usuarios y otros agentes. Ejemplo de tales sistemas
puede ser IRA [Voorhess, 1994].
9.3 Problemática
en la aplicación de agentes
Una posible explicación de la dificultad
de implantación de las técnicas de IAD y en especial en el
área de robótica móvil es la constatación de
la imposibilidad de realizar investigación en inteligencia artificial
en robótica móvil de forma aislada. Los trabajos se entienden
actualmente como elementos del área más amplia del control
automático e IA. Por lo tanto, los investigadores en IAD conocen
un área más amplia y están dispuestos a trabajar en
su integración con otros sistemas informáticos (en nuestro
proyecto proponemos integrar el paradigma agente en herramientas CACSD
[de
la Rosa, 1997]
). La tendencia es en la definición de herramientas,
o componentes de programa, que permitan desarrollar aplicaciones robóticas
a través de un entorno amigable. Un proyecto Europeo (HELIOS-2,
AIM A2014) propone un entorno basado en objetos que permite la integración
de diferentes servicios: de tratamiento de imágenes, de procesamiento
de lenguaje natural, de sistemas de soporte a la decisión, etc.
Recientemente han aparecido propuestas
de arquitecturas como ARCHON [Wittig, 1991, Corera,
1996; Jennings, 1996]
en aplicaciones de distribución de
energía eléctrica, ejecutado como un sistema experto distribuido
que supervisa la operación de la red eléctrica a nivel de
subestación (media-alta tensión). Dicho proyecto ha sido
sufragado con financiación ESPRIT junto con la empresa IBERDROLA,
y es el auténtico referente a nivel internacional de la aplicación
real de agentes en entornos industriales complejos distribuidos. A pesar
de estas iniciativas, son escasos los trabajos que adoptan una aproximación
basada en sistemas multi-agente en todas sus consecuencias debido a la
dificultad de aplicar los agentes software sobre sistemas reales, que los
entendemos como sistemas físicos. Este nuevo tipo de agentes se
discute en el punto 1.5.
9.4
Los Sistemas Computer Aided Control Systems Design (CACSD)
El sistema de supervisión contiene
un conjunto de reglas de identificación de estados de operación
anormal y de generación de acciones correctivas. La misión
del sistema de supervisión puede ser, además, la de generar
conjuntos de valores de consigna para los controladores locales. Los sistemas
de supervisión actuales se caracterizan por su escasa generalidad
y su limitado dominio de aplicación al propio sistema para el cual
fue concebido. La implantación de sistemas dotados de IA en los
entornos industriales de producción, hasta el momento, se ha reducido
a pequeñas aplicaciones de control (controladores fuzzy) o al desarrollo
de complejos sistemas expertos (SE) para el diagnóstico de procesos
muy concretos (aplicaciones hechas a medida) de difícil mantenimiento.
En ambos casos, pero especialmente en el caso de los SE, son soluciones
a problemas concretos, cerrados, de difícil reconfigurabilidad y
que carecen de una visión global de los problemas de automatización
debido a la difícil funcionalidad integrada. Sin embargo, continuar
trabajando con la IA junto con los soportes informáticos que la
permiten en proyectos de automatización es un aspecto justificado
científicamente. A partir de un diseño de un supervisor debe
procederse a una implementación funcional en un tiempo razonable.
Por consiguiente, al igual que ha sucedido
con los entornos de ayuda al diseño de sistemas de control (CACSD),
se ha hecho necesario disponer de un entorno de ayuda al desarrollo e implantación
de sistemas de supervisión que permitiese la integración
de diferentes herramientas de forma abierta, y que permita diseñar
sistemas de control y sistemas de supervisión como un todo en proyectos
de automatización. Es lo que denominaremos CAD de supervisión.
La solución de esta deficiencia tecnológica es un aspecto
prioritario debido a la creciente necesidad de un tratamiento global de
los problemas de automatización basado en una visión global
del ciclo de un producto, dado que en un mismo entorno CACSD que soporta
el diseño de soluciones de control de un proceso se integra un CAD
de supervisión que soporta el diseño de soluciones de monitorización
avanzada y supervisión. Así se pretende tratar de una forma
global el diseño de los niveles 1, 2 y 3 (Control, Monitorización-Supervisión,
y Supervisión-programación-coordinación-cooperación)
dentro de la pirámide CIM (Computer Integrated Manufacturing).
Existen una serie de entornos de ayuda
al diseño de sistemas de control (CACSD) que han ido evolucionando
hacia sistemas abiertos basados en la integración de herramientas.
El ejemplo más claro nos lo da MATLAB/SIMULINK de MathWorks el cual
dispone de un entorno al que se añaden herramientas de análisis
y ayuda al diseño de sistemas de control (Toolboxes) según
las necesidades, y que dentro de un entorno Windows se puede utilizar de
forma abierta aplicando la filosofía de cliente-servidor con las
DDE (Dynamic Data Exchange), que igualmente es extrapolable en un entorno
UNIX. Ambos son ejemplos de entornos comerciales, ampliamente utilizados
por la comunidad científico-técnica de todo el mundo tanto
a nivel de investigación como en el desarrollo de aplicaciones industriales,
que a pesar de sus ventajas no ofrecen facilidades reales para las fases
finales de diseño e implantación de sistemas de supervisión
tal como [Rakoto y Aguilar-Martin, 1995] y la experiencia de nuestro grupo
de investigación revelan.
Esta experiencia obtenida de aplicar el
concepto CACSD a la supervisión pretendemos que puede ser aportada
a la ayuda del diseño de agentes físicos, los cuales se explican
en la siguiente sección. De hecho, las primeros fundamentos de la
cooperación de sistemas expertos en tareas de supervisión
que desarrollamos en el grupo vienen desde 1992 con trabajos como [de la
Rosa, 1992, 1995; Aguilar 1994]
9.5
Agentes físicos
Los agentes físicos incorporan a
los agentes software la problemática de la interface numérico-simbólica
y simbólico-numérica que caracteriza los sistemas físicos
que, de acuerdo a [Asada, 1997], están
sometidos a restricciones del mundo real tales como imprecisión,
incertidumbre, variabilidad en el tiempo, entre otras características.
Una realización común, aunque no es la única, de los
agentes físicos son los robots móviles que se les incorpora
en la investigación actual una alta autonomía y capacidad
de trabajar de forma cooperativa. La IA tradicional ha estado principalmente
buscando la metodología para manipular símbolos usados en
la adquisición y representación de conocimiento, y su razonamiento,
gastando poca o nula atención en sus aplicaciones a mundos dinámicos
reales. Mientras, en robótica se ha puesto mucho énfasis
en los temas de diseño y construcción de hardware y su control.
Actualmente, los tópicos recientes cubren dos áreas que incluyen
los principios del diseño de agentes autónomos, colaboración
multi-agente, adquisición de estrategias, razonamiento a tiempo
real y planificación, robótica inteligente, sensor-fusion,
y aprendizaje de comportamientos. Estos tópicos exponen nuevos aspectos
que son difíciles de resolver con los enfoques tradicionales.
Para la solución de estos nuevos
aspectos y finalmente alcanzar el objetivo último de la IA y la
robótica consistente en construir sistemas inteligentes que resuelven
de forma emergente tareas complejas en un mundo real dinámico (aquí
dinámico entendido como un mundo altamente cambiante), los cuerpos
físicos tienen un rol importante de conducir el sistema agente a
una interacción significativa con el entorno físico, complejo,
incierto, pero que es regido por un conjunto de restricciones. El significado
de "tener un cuerpo físico" puede resumirse como sigue:
Las capacidades sensoriales y las de actuación
están altamente ligadas.
-
Para el agente ejecutar las tareas encomendadas,
los espacios sensoriales y de actuación deben ser abstraídos
dentro de los recursos del agente (memoria, potencia de proceso, controladores,
etc.).
-
Dicha abstracción depende de las interacciones
del agente con el entorno.
-
Fruto de la abstracción, cada agente
tiene un modelo de representación del entorno.
-
En el mundo real, tanto las interacciones
inter-agentes como agentes-entorno son asíncronas, paralelas y arbitrariamente
complejas. Los agentes físicos evolucionan de forma continuada a
tiempo continuo.
-
La complejidad natural de las interacciones
físicas genera distribuciones fiables de datos para los algoritmos
de aprendizaje de los agentes físicos, en comparación a los
agentes software.
Los retos (challenges) que en investigación
quedan por resolver en el caso de agentes físicos vienen expresados
en [Asada, 1997], y se pueden resumir en:
-
Percepción. Los agentes físicos
deben tener capacidad de usar una percepción de amplio rango, discriminar
otros agentes físicos, estimar sus posiciones y la suya propia,
entre otras. La percepción es una aplicación básica
que se extiende en las aplicaciones robóticas.
-
Acciones. El agente físico ha de ser
capaz de controlar su cuerpo físico. En el caso de robots móviles,
ha de ser capaz de ejecutar trayectorias, seguir objetivos, los cuales
no han de ser necesariamente estáticos.
-
Situación y comportamiento. Aunque
las tareas a realizar sean simples, casi infinitas situaciones aparecen
debido a los continuados cambios del entorno, como por ejemplo los objetivos
móviles, que otros agentes físicos se desplacen en el mismo
entorno, etc.
-
Tiempo real. Como que la situación
cambia continuamente, hay restricciones de tiempo en la toma de nuevas
decisiones, re-planificación de trayectorias, y adecuación
de los controles.
-
Plataforma. Debe decidirse cual es la plataforma
de experimentación de los agentes físicos que facilite la
investigación internacional e interdisciplinaria sobre dichos agentes.
9.6
Robots móviles autónomos y cooperantes
El grupo de investigación de la
Universidad de Girona ha sido regularmente financiado por el Korean Advanced
Institute of Science and Technology (KAIST) de Corea para la participación
en la Micro-Robot World Cup Soccer Tournament que se celebró en
dicho país los pasados 9-12 de noviembre de 1996, así como
la edición de 1-5 de Junio de 1997. También la empresa SONY
ha financiado para la participación de dicho grupo de investigación
en RoboCup del 23 al 29 de Agosto de 1997. El éxito científico
y tecnológico de dicho grupo de investigación en dichas conferencias
que utilizan robots móviles autónomos y cooperantes, utilizando
la demostración de los avances tecnológicos y de investigación
en una emulación del juego de fútbol, fue muy alentador en
el sentido de la viabilidad científica y la capacidad tecnológica
de dicha universidad en la implementación de robots móviles
autónomos. Aun mejor, se plantearon numerosos nuevos problemas y
una plataforma ideal de demostración de resultados de investigación
en ciencia y tecnología de naturaleza eminentemente compleja: el
juego de fútbol, el cual, un colectivo de jugadores robóticos
juegan en equipo (de forma cooperativa) un partido de fútbol en
un campo de dimensiones reducidas a escala, y una reglamentación
inspirada del fútbol (soccer) real. Dichos sistemas integran, en
un volumen inferior a los 7,53 cm3, sensorización,
en especial visión, control automático, electrónica,
informática industrial, e inteligencia artificial. Los robots (de
3 a 5 robots por equipo) evolucionan sobre un mismo terreno de aplicación
a alta velocidad, persiguiendo objetivos móviles, uno de ellos es
una pelota de golf que emula una pelota de fútbol. Las reglas que
regulan dicho evento científico vienen enunciadas en [Kitano,
1997] y las referencias que se obtienen de dicho artículo.
Esta es una aplicación de control
a nivel de control de aceleraciones, velocidades y posición con
diversas restricciones de control y medida, control y planificación
de trayectorias, supervisión y comportamiento inteligente eminentemente
cooperativo para la consecución de un objetivo global. El entorno
es impreciso e incierto al ser eminentemente variante a lo largo del tiempo
y tener medidas con diferentes grados de precisión y repetitividad.
La necesidad de combinar soluciones de control avanzado para los niveles
básicos de control y planificación, así como la aplicación
de la IA en los niveles de supervisión y comportamiento hacen de
este ejemplo de desarrollo un ejemplo excelente de la complejidad de la
integración control avanzado y sistemas inteligentes para resolver
problemas poco estructurados que aparecen en aplicaciones poco convencionales.
El impacto científico y social de dicho tipo de aplicaciones augura
un alto nivel de incidencia de nuestra investigación que proponemos
en este proyecto y que, de hecho, ya demuestra el hecho de tener un artículo
publicado al Robotics & Autonomous Systems en Octubre de 1997 [de
la Rosa, 1997], así como numerosas comunicaciones en medios
de TV, radio y prensa escrita en España, Francia y Alemania.
Además, esta plataforma de demostración
será compartida por otros grupos de investigación mediante
técnicas de tele-operación basada en internet de tal forma
que desde la UdG se gestionará la experimentación de los
algoritmos de control, supervisores, y planificación que creen dichos
grupos, ejecutará y retornará los resultados. Gracias a la
uniformización que representa el desarrollar control y supervisión
en la herramienta de prototipado MATLAB-SIMULINK se podrá implementar
los algoritmos en el sistema micro-robótico con procedimientos estándar
y funcionará la plataforma de experimentación como un servidor
de experimentos.
Luego, dicha plataforma servirá
metodológicamente para testear y demostrar que la tecnología
generada como resultado de investigación está funcionando
correctamente antes de acometer problemas industriales generales.
Bibliografía
En la memoria aparecen referenciadas y
subrayadas para distinguirlas de otras más accesorias.
Asada M., Kuniyoshi Y., et al.
(1997): The RoboCup Physical Agent Challenge, First RoboCup Workshop
in the XV IJCAI-97 International Joint Conference on Artificial Intelligence,
pp.51-56
Cohen P. and Levesque H. (1990): Intention
is choice with commitment. Artificial Intelligence, 42:213-261.
Corera J. M., et al (1996): Using Archon,
Part 2: Electricity Transportation Management, IEEE Expert and Intelligent
Systems, Vol 11, n. 6, pp. 70-79
Jennings N.R. et al (1996): Using
Archon to Develop Real-World DAI Applications, Part 1, IEEE Expert
and Intelligent Systems, Vol 11, n. 6, pp. 64-70
Kitano H., Veloso M., et al. (1997): The
RoboCup Synthetic Agent Challenge 97, XV IJCAI-97 International Joint
Conference on Artificial Intelligence, Vol 1, pp.24-29
de la Rosa J. Ll., Oller A., et
al. (1997): Soccer Team based on Agent-Oriented Programming, Robotics
and Autonomous Systems. Ed. Elsevier, Vol 21, pp. 167-176. October
1997.
Rakoto, N. and Aguilar-Martin J. (1995)
: Supervision de processus à l'aide du système expert G2,
Ed. Hermès-1995, ISBN 2-86601-499-5.
Shoham Y. (1990): Agent-oriented programming.
Technical Report STAN-CS-1335-90, Computer Science Department, Stanford
University, Stanford, CA.
Stone P. and Veloso M. (1997): A layered
approach to learning client behaviors in the robocup soccer server, to
appear in Applied Artificial Intelligence.
Varaiya P. and Deshpande A. (1995): Viable
Control of Hybrid Systems: Hybrid Systems II, Lecture Notes in
Computer Science, Springer Verlag. 1995.
Wittig T. (1991) "Sistemas Expertos Cooperantes",
Workshop
La inteligencia Artificial y el Control en Tiempo Real, Santander,
25-28 June 1991
Wooldridge M., Jennings N.R. (1995):
Intelligent
Agents: Theory and Practice, The Knowledge Engineering Review,
Vol 10:2, pp. 115-152
Agha, G. (1986): ACTORS: A Model of Concurrent
Computation in Distributed Systems. The MIT Press. Cambridge, MA.
Aguilar J. (1994): Knowledge-based Real
Time Supervision of Dynamic Processes: Basic Principles and Methods, Applied
Control: Current Trends and Applied Methodologies, Ed. Marcel Dekker,
Inc., 1993.
Del Acebo E., Oller A., de la Rosa J. L.
(1997): Three Criteria for Fuzzy Systems Quality Evaluation, Workshop
on Automation 2001, pp. 265-274, June 12-15, 1997, Viena, Austria.
Cohen, P. R. and Levesque, H. J. (1990):
Intention is choice with commitment. Artificial Intelligence, 42:213-261.
Durfee E.E., Lesser V.R., and Corkill D.D..
"Trends in cooperative distributed problem solving". IEEE Transactions
on Knowledge and Data Engineering, 1(1):63-83, 1989.
Fisher, M. (1994): A survey of Concurrent
MetateM - The language and its applications. In Gabbay, D. M. and Ohlbach,
H. J., editors, Temporal Logic - Proceedings of the first International
Conference (LNAI Volume 827), pages 480-505. Springer-Verlag: Heidelberg,
Germany.
Hewitt, C. (1977): Viewing control structures
as patterns of passing messages. Artificial Intelligence, 8(3):323-364.
Jennings, N. R. (1993): Commitments and
conventions: The foundation of coordination in multi-agent systems. Knowledge
Engineering Review, 8(3):223-250.
Kripke, S. (1963): Semantical analisis
of modal logic. Zeitschrift für Matematsche Logik und Grudlagen
der Mathematik, 9:67-96.
Maes P. (1994): Social interface agents:
Acquiring competence by learning from users and other agents. In Etzoni
O. editor, Software Agents - Papers from the 1994 Spring Symposium, pp.
71-78, AAAI press.
Maes P. (1989): The dunamics of action
selection. In Proceedings of the Eleventh International Joint Conference
on Artificial Intelligence (IJCAI-89), pages 991-997, Detroit, MI.
Meléndez J., de la Rosa J. Ll.,
et al (1995): Embedding Objects into Matlab/Simulink for process Supervision,
IEEE
International Symposium on CACSD, pp: 20-25, Dearborn, Michigan, USA,
Sept. 15-18, 1996.
Oller A., García R., Ramon J. A.,
Figueras A., de la Rosa J. L. (1997): Co-operation among Robots by Means
of Multi-Agent Decision Making Framework under MATLAB-SIMULINK, Workshop
on Automation 2001, pp. 71-80, June 12-15, 1997, Vienna, Austria
de la Rosa J. Ll., Serra I., and Aguilar-Martin
J. (1992): Outline of a Heuristic Protocol among Cooperative Expert Systems,
IEEE
Conference on Systems, Man, and Cybernetics, Vol. 2 pp. 905-910, September
1992
de la Rosa J. Ll., Serra I., and Aguilar-Martin
J. (1994): Heuristics for Co-operation of Expert Systems. Application to
Process Control, Ed. PIAR.
de la Rosa J. Ll., J. Meléndez,
J. Colomer et al. (1995): An Application of heuristic co-operation to process
control, 3rd IEEE Mediterranean Symposium on New Directions in Control
and Automation, Limassol, Vol 1, pp 232-237 (Cyprus), July 1995.
Rosenschein, S. and Kaelbling, L. P. (1986):
The synthesis of digital machines with provable epistemic properties. In
Halpern, J. Y., editor, Proceedings of the 1986 Conference on Theoretical
Aspects of Reasoning About Knowledge, pages 83-98. Margan Kaufmann Publishers.
San Mateo, CA.
Steels, L. (1990): Cooperation between
distributed agent through self organization. In Demazeau, Y. and Müller,
J.-P., editors, Decentralized AI - Proceedings of the Third European Workshop
on Modelling Autonomous Agents and Multi-Agent Worlds (MAAMAW-91), pages
175-196. Elsevier Science Publishers B. V. Amsterdam, The Netherlands.
Voorhees E.M. (1994): Software agents for
information retrieval. In Etzioni O. Editor Software Agents - Papers
from the 1994 Spring Symposium, pp. 126-129, AAAI Press.
download this document