LABORATORIO DOCENTE DE ROBOTS MÓVILES, COOPERANTES
Y AUTÓNOMOS
JOSEP LLUIS DE LA ROSA
Departamento de Electrónica, Informática
y Automática
Escuela Politécnica Superior
Universidad de Girona
peplluis@eia.udg.es
Resumen.: Esta comunicación propone un laboratorio
de robots móviles, cooperantes y autónomos, sus elementos,
así como se puede explotar en los estudios de ingeniería.
I. INTRODUCCIÓN
Objetivo del trabajo: un laboratorio de sistemas inteligentes
con "muchos" robots, que cree entusiasmo en los estudiantes de la especialidad
en electrónica y automática, así como los estudiantes
de informática.
La experimentación utilizando robots, diseñados
para que se comporten como sistemas dinámicos, resulta costosa y
complicada si se pretende llevar a cabo con grandes robots. Cualquier experimento
resulta costoso en tiempo y en material (aun suponiendo que se dispone
de la plataforma ya construida e instrumentalizada). Los autores muestran
un laboratorio utilizando unos microrobots** de dimensiones reducidas,
con los cuales se pueden llevar a cabo diferentes experimentos. La plataforma
fue diseñada para experimentación en investigación.
Ésta puede ser utilizada
para realizar múltiples experimentos; cooperación
de múltiples robots, sistemas agentes, supervisión de sistemas
y controladores, procesado de la imagen, sistemas tiempo
real. También es posible trabajar algunos aspectos
más tecnológicos sobre los microrobots: utilización
de diferentes arquitecturas microprocesadas, actuadores y sensores. A efectos
docentes se utiliza dicha plataforma para emular el juego del fútbol.
Esta emulación motiva todavía más a los estudiantes
dado el aspecto lúdico que contiene, y más si tenemos en
cuenta que como proyecto de una asignatura de libre elección se
organiza una competición de fútbol
II. DESCRIPCIÓN DEL SISTEMA
FIG. 1 SISTEMA GLOBAL
El sistema está formado por una cámara situada
a unos 2 m de altura, la ../files/imagen de la cámara es procesada
por un ordenador, después de este procesado se dispone de las posiciones
de todos los microrobots. A partir de las posiciones el ordenador determina
las ordenes a transmitir a cada microrobot. Las ordenes se transmiten a
los robots vía radio de manera que estos son completamente autónomos,
pueden funcionar sin la intervención humana. El sistema está
dividido en dos niveles. Un nivel superior o Host que realiza funciones
de planificación y supervisión y un nivel inferior, en este
caso el microrobot, la función del cual es ejecutar de forma correcta
las instrucciones enviadas por el Host.
III. DESCRIPCIÓN DE UN MICROROBOT
En la figura 2 se ve el aspecto de un microrobot, la arquitectura
de la placa microprocesada de control se describe en el artículo
[Ramon 98]. Los robots son de dimensiones reducidas, un cubo de 7.5 cm
de lado, la velocidad máxima a la que se pueden desplazar es de
80 cm/s. El microrobot dispone de una parte de sensorización local:
2 sensores fotoeléctricos y encoders sobre los ejes de los motores.
FIG. 2 DESCRIPCIÓN DE UN ROBOT
Funcionamiento del microrobot
El ordenador principal o Host envía las posiciones
por las que ha de pasar el robot, el cálculo de estas posiciones
se realiza cada segundo, aunque cada 100 ms los robots reciben las posiciones
respectivas, el robot las utiliza juntamente con la lectura de los encoders,
para realizar un control local de posición.
IV. ENTORNO DE CONTROL Y SUPERVISIÓN
Para llevar a cabo el control y la supervisión
del sistema se ha desarrollado un entorno utilizando para ello Visual C++,
el aspecto de este entorno se da en la figura 4.
Desde la pantalla de la figura 4.a, se realiza el control
del juego (iniciar, parar, identificar robots, alarmas, etc ...), la pantalla
4.b permite obtener la posición de los microrobots y una visualización
de los mismos sobre un gráfico que reproduce a escala el campo en
el que se mueven los robots. Este entorno permite también realizar
una calibración del campo respecto al sistema de visión.
Otra pantalla similar a la 4.b permite marcar una trayectoria, generar
las consignas necesarias y capturar la trayectoria ejecutada por el robot
para poder comparar resultados o abrir el fichero desde el interior de
programas de simulación como Matlab-Simulink.
V. ESTRUCTURA DEL LABORATORIO
Actualmente se está trabajando en la puesta en
funcionamiento de algunos benchmarks, de manera que puedan ser ejecutados
a través de Internet o vía TCP/IP, esta opción ya
es posible, de manera que en un laboratorio se dispone de un Host servidor,
que permite al usuario ejecutar los experimentos preprogramados con sus
parámetros y ver el resultada de los mismos. De esta manera un usuario
remoto puede llevar a cabo diferentes experimentos sin necesidad de estar
físicamente en el laboratorio donde está situada la plataforma,
ver figura 5.


FIG. 5 DESCRIPCIÓN DEL LABORATORIO
Desde el punto de vista docente se imparten dos asignaturas
de libre elección en este laboratorio, donde en la primera el alumno
aprende el funcionamiento de un solo robot y en la segunda deberá
trabajar con múltiples robots con el objetivo de preparar una competición
de fútbol microrobótico. La inversión de este laboratorio
es tal como sigue:

Entonces la inversión requerida para montarlo es
de 4.2 millones de pesetas, a parte del mobiliario consistente en 2 campos
de fútbol del tamaño de una mesa de pingpong, estructuras
de iluminación para dar 1000 lux uniforme en cada campo de fútbol,
4 mesas de laboratorio y 20 sillas de laboratorio, que requiere de una
inversión adicional de 750.000 pesetas.
Vistas de cómo se ejecutan las classes demostrativas
son las siguientes:
VI. PROSPECTIVA DE CLASES DE PRÁCTICAS
Esta plataforma ha servido de base para asignaturas de
libre elección impartida por el Departamento de Electrónica,
Informática y Automática. A partir de ahora el laboratorio
está preparado para una explotación masiva en asignaturas
obligatorias y optativas de 2n y 1r ciclos de ingeniería industrial
y de la ingeniería técnica en electrónica.
A nivel robot
Control local: el robot debe ejecutar de forma correcta las
consignas enviadas por el host, para ello debe disponer de un control local,
que se pueden adoptar diferentes estrategias, ej. control PID.
Arquitecturas microprocesadas: utilización de diferentes
arquitecturas para la construcción de la placa de control; arquitecturas
PIC, microcontroladores o microprocesadores.
Sensores: Infrarrojos, ultrasonidos, fotoeléctricos,
encoders de diferentes construcciones.
Actuadores: Motores de DC y motores paso a paso. En cada
caso se ha estudiado los interfaces de potencia son necesarios para accionar
los diferentes motores
A nivel host
Estrategias de control
Cooperación de robots
Monitorización de sistemas dinámicos
Se han preparado algunas prácticas y otras están
en preparación o proyecto. Aquí vemos las prácticas
y el tipo de asignaturas que pueden recibir servicio de este laboratorio.
MCPRED. Control predictivo de la trayectoria de un robot.
MFK. Filtre de Kalman eliminando ruido en la medida de posición
de 1 robot.
MCR. Control Robusto delante de imprecisiones del modele.
MCP. Diseño de un controlador proporcional con especificaciones
de precisión del control de un robot.
MPOLS. Asignación de Polos para el comportamiento
de un robot.
MID. Identificación de la función de transferencia
de 1 robot.
MMOD. Modelización de un robot.
MPLT. Planificación de trayectorias.
MSUP. Supervisión del comportamiento de un robot en
la ejecución de trayectorias.
MARQ. Arquitectura del sistema integrado.
MTR. Tiempo real y sistemas discretos en el control del robot.
MDNN. Decisión de las acciones de un robot mediante
redes neuronales.
MDSE. Decisión de las acciones de un robot mediante
Sistemas Expertos.
MDAG. Decisión de les acciones de un robot mediante
Algoritmos Genéticos.
MPERP. Sistemas de percepción aplicados a los robots.
Seguimiento de objetos a color en tiempo real.
MAV. Control de alta velocidad. Coordinación de acciones
con alta velocidad.
MCON. Convoyes de vehículos autónomos dentro
de celulas de produccióm industrial.
MCC. Control en cascada de 1 robot.
Decisión cooperativa: agentes deliberativos.
MDCF. Decisión cooperativa: agentes físicos.
Inteligencia Artificial embedded.
MMPD. Microprocesadores embedded.
MC1x1. Competición de fútbol 1x1.
MC5x5. Competición de fútbol 5x5.
MAGENT0. Diseño de agentes (decisión de un
robot) con el lenguaje agent0.
Otras prácticas más relacionadas con los microprocesadores
y la electrónica de potencia .
Y estas prácticas se distribuyen como sigue en la
tabla número 1de la siguiente página
VII. CONCLUSIONES
Como se ha visto se trata de una plataforma en la que
se puede experimentar con sistemas que disponen de una dinámica
donde los experimentos que se pueden llevar a cabo son múltiples,
además de permitir teleoperación. El coste de la plataforma
es relativamente bajo si se compara con otros sistemas multi-robot. Resulta
atractiva para los estudiantes, lo cual siempre facilita la tarea docente
a quien tiene que impartir los conocimientos teóricos y prácticos
necesarios.
VI. AGRADECIMIENTOS
Ese trabajo está financiado parcialmente por el
proyecto CICYT TAP98-0955-C03-02, "Diseño de agentes físicos
(DAFne)" del gobierno español.
VII. REFERENCIAS
Para obtener más información se pueden consultar
las direcciones que se dan a continuación. Sobre la asignatura,
Futbol y afición a la ciencia: http://rogiteam.udg.es/docencia/docencia.shtml
Sobre la plataforma: http://rogiteam.udg.es
[1] Ramon J.A., Figueras A., Oller A., y de la Rosa J.
Ll. "Plataforma docente de robots móviles, cooperantes y autónomos".
Congreso TAEE (Tecnologias Aplicadas a la enseñanza de la electrónica),
pp. 47-51. Septiembre 1998, Madrid.
[2] de la Rosa J. Ll. I Montaner M., "Docència
de tècniques dIA mitjançant Javasoccer". Actes del 2n Congrés
Català dIntel·ligència Artificial i Butlletí
de lACIA, num 18-19, pp: 99-108, octubre 1999.
VIII. CURRÍCULUM
Josep Lluís de la Rosa es Doctor en Ciencias por
la Universidad Autónoma de Barcelona desde 1993 http://eia.udg.es/~peplluis.
Tras consecutivas estancias pre y postdoctorales en Francia, es el director
del grupo de investigación eXiT, Ingeniería de Control y
Sistemas Inteligentes, desde el 1994, http://eia.udg.es/exit.
Sus trabajos más conocidos son los agentes físicos y especialmente
los relacionados con los desarrollos con robots futbolistas, http://rogiteam.udg.es
TABLA 1. CÁLCULO DE LA UTILIZACIÓN DEL LABORATORIO
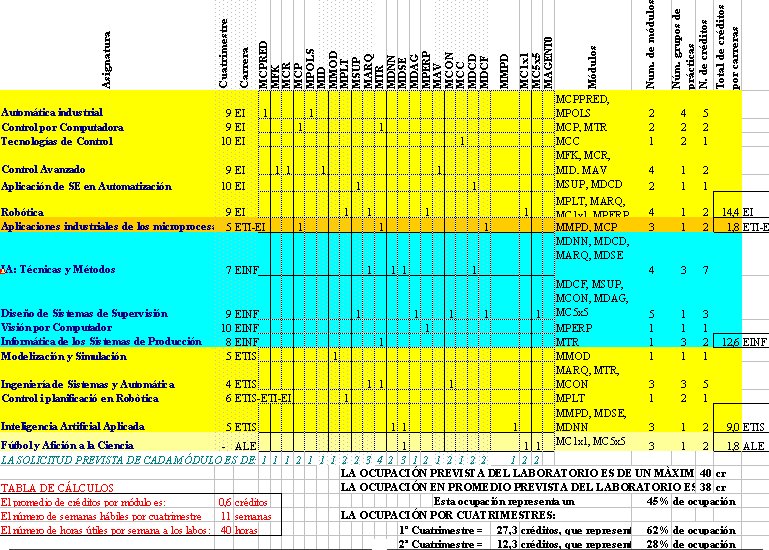
EI = INGENIERÍA INDUSTRIAL
EINF = INGENIERÍA INFORMÁTICA
ETIS = INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS
ETI-EI = INGENIERÍA TÉCNICA INDUSTRIAL EN ELECTRÓNICA
INDUSTRIAL
EL SISTEMA INTEGRADO DE LA PLATAFORMA DE EXPERIMENTACIÓN
DE ROBOTS MÓVILES, AUTÓNOMOS Y COOPERANTES
JOSEP LLUÍS DE LA ROSA ESTEVA BIANCA M. INNOCENTI
BADANO
Escuela Politécnica Superior Escola Politècnica
Superior
Universitat de Girona Universitat de Girona
peplluis@eia.udg.esbianca@eia.udg.es
Resumen: Descripción de la plataforma
de experimentación de robots móviles y autónomos,
utilizados para la emulación de un partido de fútbol robótico.
Hay un breve resumen del sistema de visión utilizado, el de control
y la estructura de los micro-robots utilizados.
Palabras Clave: Sistemas Multi-Agentes, Control,
Robots Móviles y Autónomos.
I. INTRODUCCIÓN
La plataforma de experimentación de robots móviles
y autónomos está formada por un campo de fútbol, por
un sistema de control, por un sistema de visión y por 5 micro
robots (como máximo) por equipo.
FIGURA 1: PLATAFORMA UTILIZADA PARA JUGAR FÚTBOL.
El sistema de visión, utilizando una cámara
CCD, captura las posiciones de los robots y la pelota (PC_1) y las transmite
al sistema de control (PC_2), el cual se encarga de decidir las acciones
que realizarán los jugadores y de enviarlas a los robots vía
un enlace de radio (Radio Link).
A continuación se explicarán brevemente
las diferentes partes del sistema integrado.
II. CAMPO DE FÚTBOL
Actualmente existen dos tipos de competiciones diferentes
en las cuales los robots de la Universitat de Girona pueden participar.
Éstas son la MIROSOT y la RoboCup. Cada una de ellas tiene sus propias
reglas, en las cuales se especifican tanto el tamaño del campo como
el de los jugadores, además de las medidas del área, círculo
central, etc., y las reglas referentes al desarrollo del juego. Debido
a esto, el campo de fútbol, formado por una plataforma de madera,
tiene diferentes medidas.
La Fig. 2 muestra las medidas del campo de fútbol
de la MIROSOT y la Fig. 3, la de la RoboCup. También se muestran
el tamaño del área, del círculo central y de las porterías.
Además, en la MIROSOT se especifican las posiciones que deben ocupar
la pelota y los robots para determinadas situaciones de juego como son
los penales y los tiros libres.
En la MIROSOT el tamaño máximo permitido
para los jugadores es el de un cubo de 7,5 cm de lado, mientras que en
la RoboCup, el área total ocupada por un robot no debe pasar de
los 180 cm2 y además, el robot debe caber dentro de un
cilindro de 18 cm de diámetro.
FIGURA 2: MEDIDAS DEL CAMPO DE FÚTBOL EN LA MIROSOT
FIGURA 3: MEDIDAS DEL CAMPO DE FÚTBOL EN LA ROBOCUP
III. SISTEMA DE VISIÓN
Ambos reglamentos permiten el uso de un sistema de visión
global, colocando una cámara de vídeo a unos 2 metros de
altura sobre el campo en el caso de la MIROSOT y a 3 metros, en la RoboCup.
También se estipula el color y el tamaño de la pelota, que
tiene que ser una de golf de color naranja. Para diferenciar los equipos
se utilizan los colores azul y amarillo. Además de éstos,
se permite utilizar dos colores más (sin restricciones, de momento)
para identificar a los jugadores y para determinar su orientación,
si hace falta.
El RoGi team, utiliza el color magenta para determinar
la orientación de sus jugadores y el color verde, para saber el
número de robot. La Fig. 4 muestra los diferentes "patchs" usados,
con ambos colores de equipo.
FIGURA 4: "PATCHS" USADOS POR EL ROGI TEAM
El programa de visión da las coordenadas (posición
y orientación) de los robots del equipo, las coordenadas (posición)
de los jugadores del equipo contrario y las coordenadas (posición
actual y predicción un segundo después) de la pelota. Las
posiciones están en mm y los ángulos en grados. El programa
de visión se comunica con el de control, por medio de sockets (programas
que permiten el flujo de información a través de la red)
y el orden en que se pasan los datos es el siguiente:
TABLA 1: ORDEN DE LOS DATOS QUE SE ENVÍAN A
TRAVÉS DEL SOCKET
| XP |
YP |
XP1 |
YP1 |
XJ1 |
YJ1 |
OJ1 |
XP2 |
YP2 |
OJ2 |
| XJ3 |
YJ3 |
OJ3 |
XJ4 |
YJ4 |
OJ4 |
XJ5 |
YJ5 |
OJ5 |
XC1 |
| YC1 |
XC2 |
YC2 |
XC3 |
YC3 |
XC4 |
YC4 |
XC5 |
YC5 |
I |
Donde:
-
XP: Coordenada X de la pelota.
-
YP: Coordenada Y de la pelota.
-
XP1: Predicción de la coordenada X de la
pilota 1 segundo después.
-
YP1: Predicción de la coordenada Y de la
pilota 1 segundo después.
-
XJi: Coordenada X del jugador i (con i variando
desde 1 a 5).
-
YJi: Coordenada Y del jugador i (con i variando
desde 1 a 5).
-
OJi: Orientación del jugador i (con i variando
desde 1 a 5).
-
XCi: Coordenada X del jugador contrario i (con
i variando desde 1 a 5).
-
YCi: Coordenada Y del jugador contrario i (con
i variando desde 1 a 5).
-
I: Número de imágenes dadas por la cámara
(varia entre 0 i 49).
IV. MICRO-ROBOTS
-
Medidas, forma y composición
Las medidas de los robots son las de un cubo de 7.5
cm de lado, para poder participar en la MIROSOT. Las partes que componen
los micro-robots son, dos motorreductores, que dan la motricidad al robot,
dos ruedas colocadas directamente al eje del motorreductor, unas baterías
que alimentan la electrónica y los motores, una placa con todos
los componentes electrónicos, una emisora para la comunicación
con el PC de control y finalmente la carcasa para sujetar todos los elementos.
La ubicación de éstos, se muestra en la Fig. 5.

FIGURA 5: FOTOGRAFÍA DEL MICRO-ROBOT
En ella se puede observar que en la parte inferior del
micro-robot se encuentran las baterías, que envuelven a los motorreductores;
en la parte superior está la placa con todos los componentes y finalmente,
sobre esta última, la emisora.
Un detalle importante en la estructura del robot es que
las ruedas se encuentran sobre ejes diferentes, debido al reducido tamaño
del robot y al acoplamiento directo al motorreductor, como se muestra en
la Fig. 6.
FIGURA 6: DISPOSICIÓN DE LOS MOTORES
Cada robot tiene dos motores, un micro-controlador y un
pack de nueve baterías para la alimentación de los motores
y del micro-controlador. Las características del micro son:
-
Memoria EPROM interna: 8K x 8 ampliable a 64Kbytes externos.
-
Memoria RAM interna: 256 x 8 ampliable a 64Kbytes externos.
-
2 contadores/temporizadores de 16 bits.
-
Conversor analógico-digital de 10 bits con 8 entradas
multiplexadas.
-
2 canales PWM de 8 bits de resolución.
-
6 puertos paralelos de I/O configurables.
-
1 canal de comunicación serie (UART).
-
1 temporizador/contador adicional T2 de 16 bits.
-
Frecuencia de trabajo de 16MHz.
-
Encapsulado PLCC con 68 pines.
Para la identificación de cada uno de los robots se
usa un número que va desde 160 hasta 172, incluido en el programa
de control del micro. Es necesario conocer este número para la comunicación
serie con el PC que envía las órdenes a seguir.
La carcasa que protege al robot es más grande que
el cubo de 7.5 cm de lado (sirve para adaptar el tamaño a la RoboCup),
y tiene dos finalidades esenciales, evitar que el robot quede enganchado
en las paredes y mejorar la conducción de la pelota.
La apariencia final del robot es la mostrada en la Fig.
7.

FIGURA 7: APARIENCIA EXTERNA DEL MICRO-ROBOT
-
Comunicación.
La comunicación del micro-robot está basada
en la recepción vía radio, con frecuencia de la portadora
de 418 o 433 MHz. Los receptores que llevan los robots son de la casa Radiometrix.
La Fig. 8 muestra la placa y el receptor utilizados.

FIGURA 8: RECEPTOR DEL MICRO-ROBOT
Los micro-robots reciben la trayectoria a ejecutar desde
el ordenador de control.
V. SISTEMA DE CONTROL
El sistema de control está formado por dos programas:
el de control, propiamente dicho y el de transmisión, que controla
el puerto serie del PC. La comunicación entre éstos, también
es vía sockets.
-
Programa de control
En la Fig. 9 se muestra la pantalla principal del
programa de control. En el menú principal se encuentran:
- La opción File que permite cargar diferentes
configuraciones (tamaño de campo, tiempos de ejecución de
consignas, número de jugadores, etc.) así como guardarlas.
Al iniciarse el programa, carga automáticamente la última
configuración guardada.
FIGURA 9: PANTALLA PRINCIPAL DEL PROGRAMA DE CONTROL
- La opción Language permite seleccionar
el idioma en que se desea trabajar. Están disponibles, versiones
en castellano, catalán e inglés.
- La opción Help que permite tener ayuda
sobre el programa.
- La opción Configuration que permite cambiar
todos los parámetros disponibles. Dentro de ésta, existen
5 submenús que son:
-
Team Settings que permite definir dos equipos
propios jugando uno contra el otro. La Fig. 10 muestra la parte de la pantalla
principal (submenús) y la ventana de definición de los equipos.
Al seleccionar la casilla Play with two teams
el programa principal controla ambos equipos. Team Color, colores
de equipo, sirve para diferenciar cada equipo en la ventana de juego.
-
Monitoring sirve para seleccionar las variables
que se desean guardar en un fichero con extensión dat (con el fin
de reproducir posteriormente las jugadas) y también si se desean
visualizar los equipos en la pantalla de juego. Esta pantalla se muestra
en la Fig. 11, junto con el submenú asociado de la pantalla principal.
-
Local/Remote permite introducir las direcciones
de los PC servidores del programa de visión y del puerto serie.
La Fig. 12 muestra esta ventana, más el submenú del programa
principal.
Si la casilla Remote está activada, se
debe definir el número de TCP/IP del PC servidor. El puerto asociado
al socket es el que figura en Port, el cual no debe modificarse,
a no ser que se lo haga en ambos programas (servidor y cliente). Normalmente
se utiliza el mismo PC en dónde se ejecuta el programa de control,
como servidor del puerto serie.
-
Game Operation esta pantalla,
mostrada en la Fig. 13, permite visualizar el partido de fútbol;
definir en que parte del campo se juega, norte o sur, dependiendo de la
posición de la cámara (en el caso de que sean los dos equipos
dirigidos por el mismo programa, se define el del amarillo); definir que
clase de juego desempeñan los jugadores (ataque o defensa); si se
muestran en la pantalla; y si están activados (existe la comunicación
con los programas de visión y comunicación). También
muestra las coordenadas de la pelota y de los jugadores así como
la jugada que está ejecutando.
Dentro de ésta, hay otra pantalla:
Robot Settings para cada uno de los robots. Se
accede a ella, a través del botón Player asociado con los
robots (el robot 1 es el Player 1 y así). En esta ventana, se define
el rol del jugador (atacante, defensa, portero), el número de identificación
(es el número fijado en el micro-controlador del robot) y los timers
correspondientes a las diferentes partes que forman el "objeto robot".
Además del micro-robot (hardware), el "objeto robot" tiene una "mente"
dividida en tres partes:
-
el control que verifica que las órdenes enviadas al
robot se puedan ejecutar y que se comunica con el programa de transmisión
de datos.
-
el supervisor que calcula las trayectorias libres de obstáculos
a seguir por los robots.
-
el agente que decide que acción realizar.
Estas partes, tienen asociadas un timer, cuyo valor
se define en esta pantalla. Además de estos tres, hay otro timer,
el de visión, que sirve para pedir las posiciones de los robots
y la pelota al servidor.
En esta ventana, también se puede visualizar el
estado actual del "objeto robot", es decir, si éste tiene acceso
a los sistemas de visión y comunicación y si los timers de
control, supervisión y agente están funcionando. Tanto el
supervisor como el agente pueden desactivarse.
En esta ventana existe otro botón, TestRobot, que
llama a otra y que permite verificar si la comunicación entre el
programa de control y el de transmisión funciona bien, y además
si el robot, al recibir un mensaje definido por el usuario, realiza la
acción deseada.
Existen 4 parámetros que pueden modificarse y que
son:
-
F: puede ser 128, 192 y 64. Estos números sirven
para identificar si el control que se realiza en el micro-robot (hardware)
es de posición (en tal caso, si las consignas enviadas son posiciones
iniciales o finales) o de velocidad, respectivamente.
-
V: Depende de F. Si F es 128, entonces es la coordenada
x actual del robot, si F es 192, la coordenada x a la que se desea vaya
el robot y si F es 64, la velocidad lineal requerida al robot.
-
W: Depende de F. Si F es 128, entonces es la coordenada
y actual del robot, si F es 192 es la coordenada y a la que se desea vaya
el robot y si F es 64, la velocidad angular requerida al robot.
-
T: Depende de F. Si F es 128, es la orientación
actual del robot, si F es 192, la orientación deseada para el robot
y si F es 64, un número que multiplicado por 32 ms da el tiempo
que el robot mantendrá las velocidades lineal y angular deseadas.
La Fig. 14 muestra la pantalla para configurar al robot.
-
Calibration esta ventana, mostrada en la Fig.
15, permite definir las dimensiones del campo de fútbol (MIROSOT,
RoboCup) y el tamaño de los jugadores contrarios (necesarios para
definir el tamaño de los obstáculos para el cálculo
de las trayectorias a seguir). Todas las medidas deben estar en mm.
-
Programa de Transmisión de Datos
Como se dijo anteriormente, además de este programa,
hay otro para el del manejo del puerto serie. Éste sirve para evitar
que los mensajes para los diferentes robots se pierdan o sobreescriban
cuando los "objetos robots" intenten acceder al mismo tiempo al puerto
serie del PC, para enviar las órdenes. La Fig. 16 muestra la pantalla
principal del programa.
Como se puede observar, este programa permite cambiar
algunos parámetros. Los que se pueden modificar sin alterar el funcionamiento
del conjunto (programa de control y robot) son:
-
Maximum Stack high: que define la cantidad máxima
de datos que se pueden almacenar en la cola de salida del puerto serie.
Este programa, a medida que va recibiendo los datos vía socket,
los va almacenando en la cola y los envía por el puerto una vez
la orden anterior se ha transmitido completamente. El acceso al puerto
serie está limitado por la velocidad de transmisión, que
actualmente es 9600 bauds. De esta manera, si varios "objetos robots" acceden
al puerto, los datos no se pierden.
-
Warning if stack is full: Si esta casilla se activa,
avisa con un mensaje cada vez que hay un desbordamiento del puntero de
la cola de almacenamiento de datos.
-
Beep by connection: Si la casilla está activada,
se produce un beep cada vez que un "objeto robot" se conecta con el programa
(primera vez, cuando se establece el canal de comunicación entre
los programas).
-
Beep by sending: Activada, sirve para avisar con un
beep, cada vez que un "objeto robot" envía datos al puerto serie.
-
Port Number: Sirve para identificar el puerto serie
del PC que se utilizará.
Los parámetros que, cuando se modifican afectan
la correcta ejecución del programa son:
-
Socket port: Este número sirve para definir
el canal de comunicación con el programa de control. Cuando se modifica,
hay que cambiarlo también en las casillas Port de Communication
Team 1 y Communication Team 2 que aparecen en la pantalla Local/Remote
(Fig. 12), del programa de control.
-
Maximum connection: Fija el número máximo
de "objectos robots" que pueden utilizar el puerto serie (el número
máximo permitido por el programa de control es 10).
En el protocolo de comunicaciones serie, hay algunos
parámetros que se pueden fijar cuando se desea conectar dos dispositivos.
Ellos son el bit de stop (pueden ser 1, 1.5, 2), el de paridad (sin paridad,
paridad par, paridad impar), la velocidad de comunicación (110,
300, 600, 1200, 2400, 4800, 9600, etc.) i el número de bits de información
contenidos en el paquete de comunicación (5, 6, 7, 8). Estos parámetros
NO se pueden cambiar porque habría que modificarlos también
en el robot, para que los dispositivos pudieran entenderse.
VI. CONCLUSIONES
Actualmente se dispone de una plataforma estable de experimentación
de robots móviles y autónomos, que permite desarrollar experimentos
repetibles y probar nuevas teorías en un entorno no estructurado,
dinámico y multiagente, simulando un partido de fútbol, donde
intervienen agentes cooperantes y agentes rivales. Como trabajo futuro,
hay que aumentar la robustez de la plataforma.
VII. AGRADECIMIENTOS
Este trabajo está financiado por los proyectos
TAP98-0955-C03-02 "Diseño de agentes físicos (DAFNE)" y TAP99-1354-E,
"Eurobot-Iberia: red temática en agentes físicos" del Organismo
Español CICYT
VIII. CURRÍCULUMS

Josep Lluís de la Rosa es Doctor en Ciencias por
la Universidad Autónoma de Barcelona desde 1993 http://eia.udg.es/~peplluis.
Tras consecutivas estancias pre y postdoctorales en Francia, es el director
del grupo de investigación eXiT, Ingeniería de Control y
Sistemas Inteligentes, desde el 1994, http://eia.udg.es/exit.
Sus trabajos más conocidos son los agentes físicos y especialmente
los relacionados con los desarrollos con robots futbolistas, http://rogiteam.udg.es
Bianca M. Inncenti Badano es Ingeniero Electrónico
egresada de la Universidad Nacional de San Juan, República Argentina.
Becada por la Universitat de Girona desde 1998 para realizar el doctorado
en Inteligencia Artificial. Su línea de investigación es
la influencia del cuerpo físico de un agente en la toma de decisiones
y en la cooperación.


