SENSORS
INTRODUCCIÓ
Un sensor es un dispositiu que converteix un cert fenòmen físic en senyals elèctrics que el microprocessador es capaç de llegir, generalment tensió, corrent o freqüència.
Sensibilitat i rang
Sensibilitat: és una mesura del grau de canvi en la sortida del sensor respecte a la variació del senyal a mesurar. La sensibilitat dun sensor es defineix com:
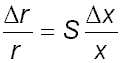
On:
x, senyal a mesurar
r, senyal de sortida
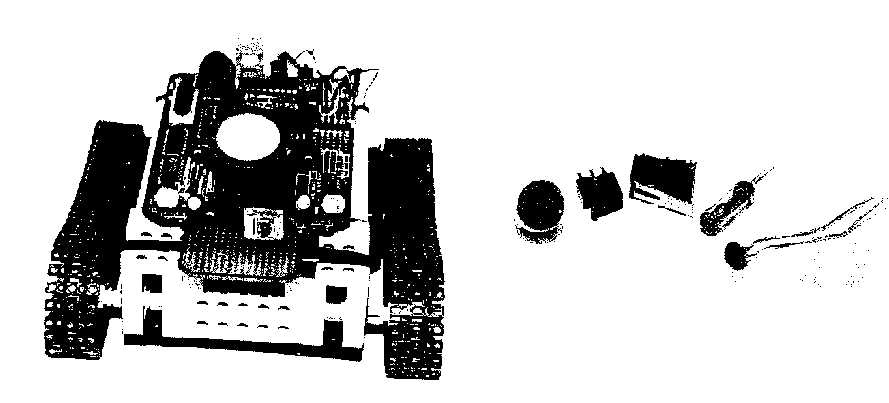
Ex. Robots amb diferents sensors
SENSORS DE LLUM
Ens interessa detectar generalment radiacions visibles i IR.
Els sensors de llum es classifiquen en:
- Fotoresistències
- Fototransistors i fotodíodes
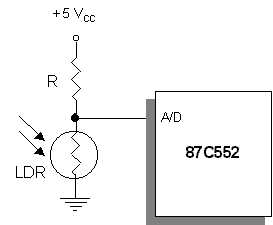
Es tracta dun sensor resistiu en que la variació de resistència sexperimenta per laplicació duna radiació lluminosa. Linterfassatge amb el ?P resultat senzilla i només cal afegir-hi una resistència.
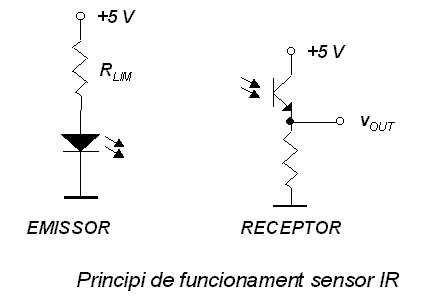
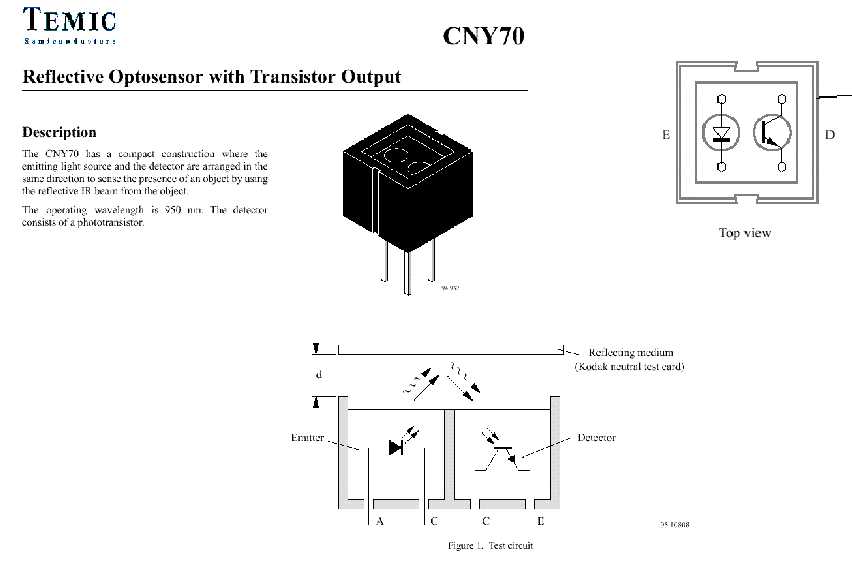
2. FOTOTRANSISTORS I FOTODÍODES
Es tracta de sensors de tipus semiconductor, saprofita la propietat
de que en un semiconductor el nivell de radiació lluminosa es capaç
de fer augmentar el corrent invers en el semiconductor.
Els sensors daquests tipus sutilitzen com a sensors de proximitat
a partir dun emissor i un receptor de IR.
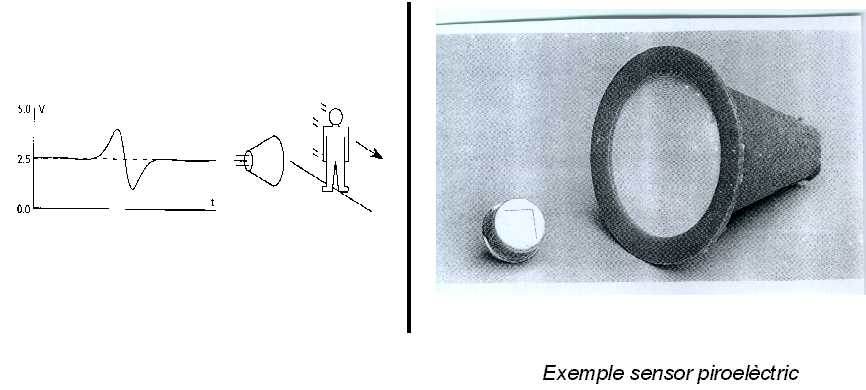
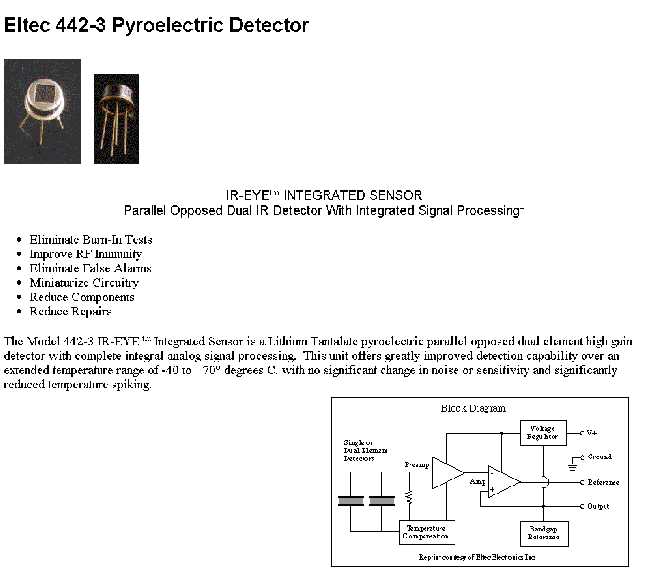
Sensors piroelèctrics
Es fan servir per a detectar moviment, són sensors capaços de detectar radiació tèrmica a temperatura ambient.
SENSORS DE FORÇA
Els sensors de força es poden fer servir per a determinar quan el robot es troba en contacte amb un altra objecte i on es troba aquest objecte amb relació amb el robot.
MICROINTERRUPTORS
Aquest proporcionen una sortida binària corresponent al seu estat, connectat o desconnectat.

GALGUES EXTENSOMÈTRIQUES
Les galgues extensiomètriques es fonamenten en la variació de la resistència dun conductor o semiconductor quan se li aplica un esforç mecànic.
SENSORS PIEZOELÈCTRICS
Lefecte piezoelèctric consisteix en laparició duna polarització elèctrica en un material al deformar-se sota lacció duna força.
Sensors de so
Sensors de so en la banda audible permeten al robot interaccionar amb loperador, en canvi els sensors dultrasons permeten detectar i evitar els obstacles.
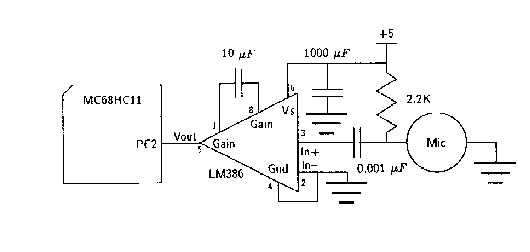
MICROFONS
Un micròfon es pot connectar fàcilment amb el uP. Sutilitzen per a: fer anar el robot cap a una font sonora o allunyar-se de la font, respondre a uns sons determinats o localitzar un punt que emet un so.
SONAR
Mentres un sensor dIR només proporciona informació de
la existència o no dun objecte, però no de la seva proximitat
els sensors dultrasons proporcionen informació de la distància
de lobjecte.
Aquest tipus de sensors emeten una ona i determinen el temps en que
triga en tornar, a partir de la velocitat de propagació poden determinar
la distància del sensor a lobjecte.
POSICIÓ I ORIENTACIÓ
Per a que un robot pugui trobar el camí que ha de seguir en un determinat entorn ha de realitzar certes mesures, anem a revisar els sensors que ens poden ajudar en aquesta tasca
ENCODER
Un encoder sutilitza per a mesurar la posició duna roda o la
velocitat de gir.
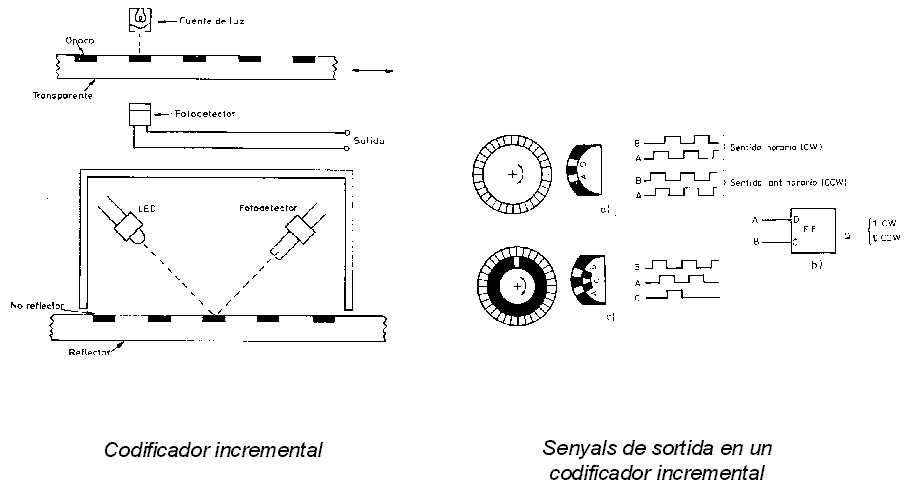
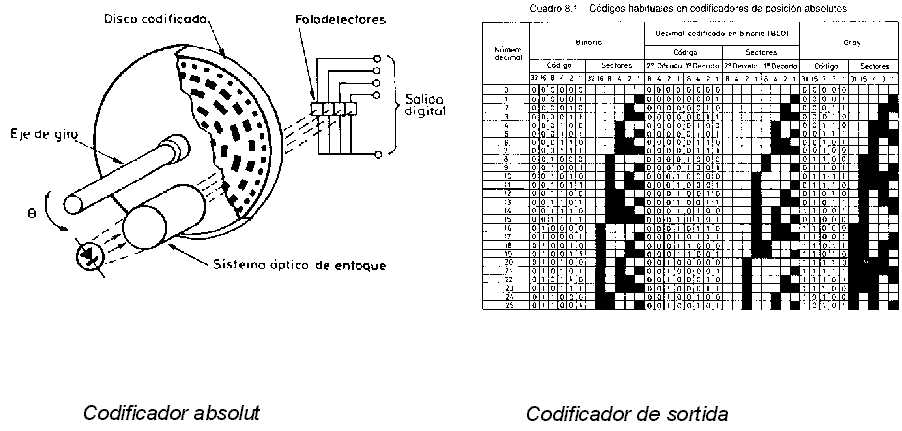
Els encoders es classifiquen en absoluts o incrementals.
Absoluts, proporcionen un codi que indica la posició exacta del
disc al voltant dels 360º.
Incremental, proporcionen un nombre determinat de polsos per revolució,
safegeix un altra senyal en quadratura per a determinar el sentit de gir.
GYROS
Un giròscop es fa servir per a determinar la velocitat de rotació dun robot i per tant el desplaçament realitzat
BRUIXOLA
Dóna informació exacte de lorientació del robot.
MESURES INTERNES
Nivell de bateria
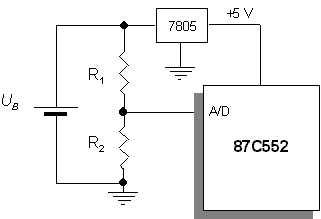
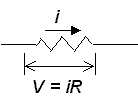
Sensat del corrent
Es pot fer a través duna resistència mesurant la caiguda de tensió
Emissor-Receptor ranurat

Motors Elèctrics. Classificació dels diferents tipus de motors.
Un motor elèctric converteix energia elèctrica en energia mecànica.Tipus:
AC, accionats a partir duna font dalterna, sutilitzen en aplicacions on la potència necessària es elevada. En robòtica presenten linconvenient que generalment no es disposa duna font de AC
DC, accionats a partir duna font de contínua, en tenim de diferents tipus:
- DC descombretes (brush-type)
- Pas a Pas
- Brushless
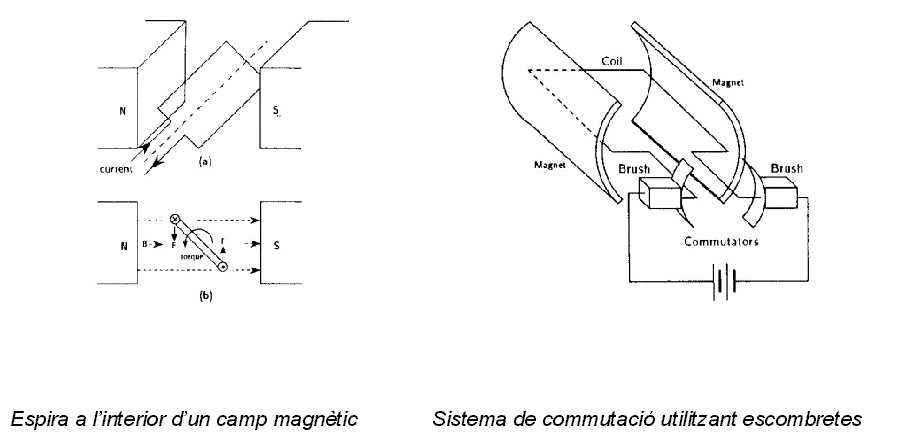
Funcionament dun motor DC
Tipus de motors DC descombretes
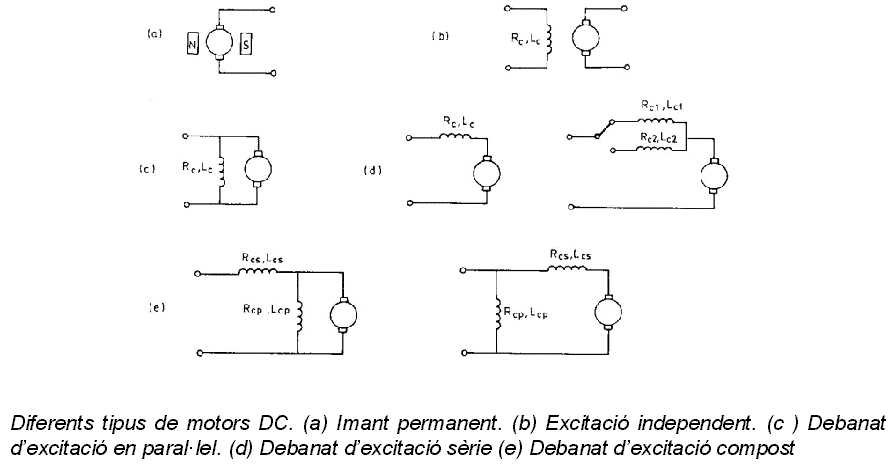
Diferents tipus de motors DC. (a) Imant permanent. (b) Excitació independent. (c ) Debanat dexcitació en paral·lel. (d) Debanat dexcitació sèrie (e) Debanat dexcitació compost
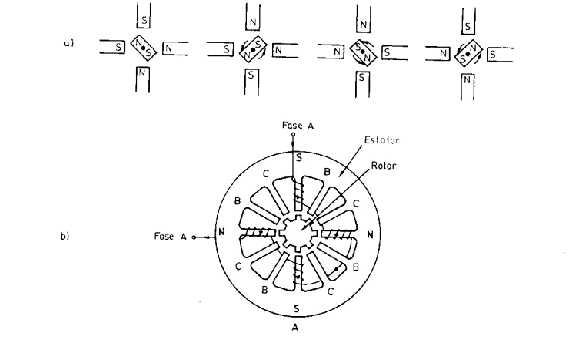
Motor pas a pas
Principi de funcionament
Drivers per a motors de DC. Tècniques de control
Accionament: Un microprocessador o qualsevol altre element de control no pot accionar directament un motor ja que no pot proporcionar suficient corrent. Per tant sha dincloure un accionador que proporcioni suficient energia per a accionar el motor.
Control: En robòtica apareix la necessitat de controlar el sentit de gir del motor i la velocitat de rotació.
- Sentit de gir: en un motor de DC saconsegueix invertint la polaritat de la tensió aplicada en borns
- Velocitat de gir: saconsegueix variant el valor mig de la tensió dalimentació del motor. Per a variar la tensió es pot fer amb elements reguladors lineals o amb tècniques de modulació damplada de polsos (PWM)
Solucions adoptades per a la variació de velocitat
a. Alimentació a través dun amplificador, tensió de control contínua
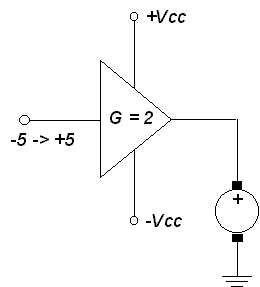
Inconvenients:
- La tensió de control ha désser contínua de +Vcontrol a -Vcontrol
- Necessita dues tensions dalimentació
El valor mig de la tensió lliurada al motor varia en funció del temps que linterruptor es troba tancat i obert. Es varia el cicle de treball D.
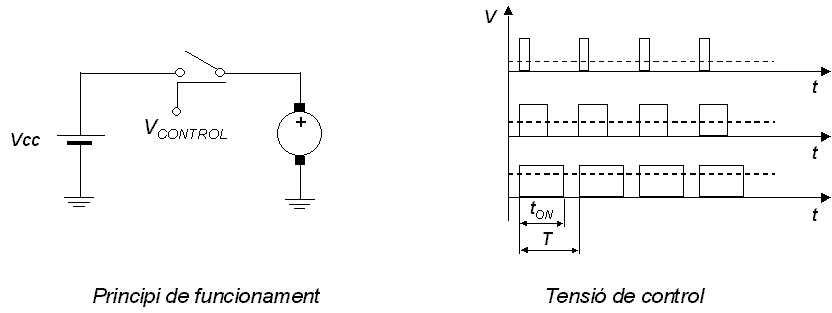
Inconvenient:
- Permet només un únic sentit de gir
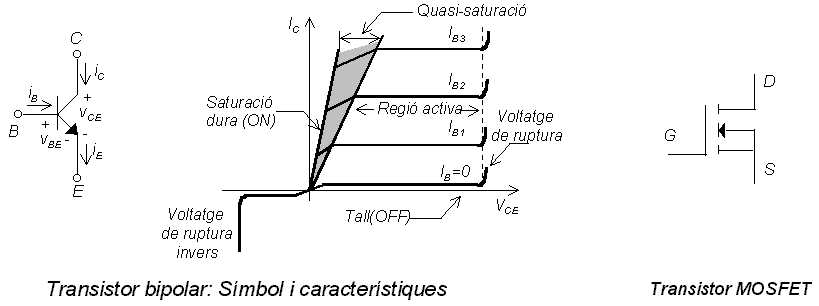
Com a interruptors el convertidors de potència (tot sistema que fa una conversió de lenergia) utilitzen semiconductors treballant en tall i saturació.
Exemple: Transistors bipolar o transistor MOSFET
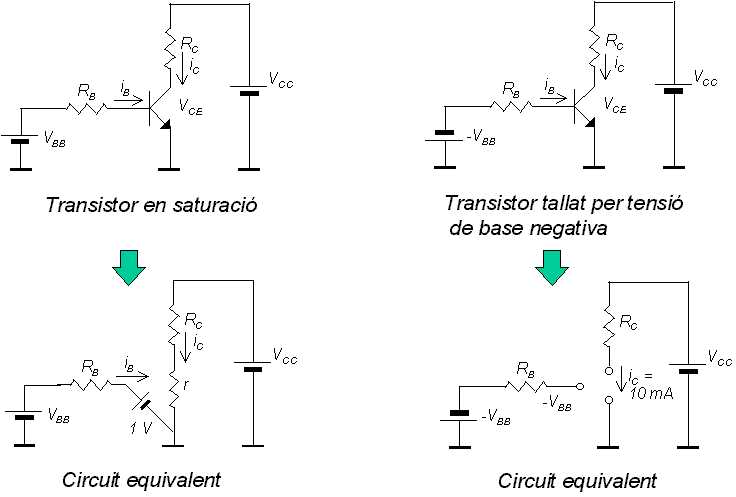
Transistor bipolar. Circuit equivalent en tall i saturació
Inversió del sentit de gir i variació de la velocitat de rotació

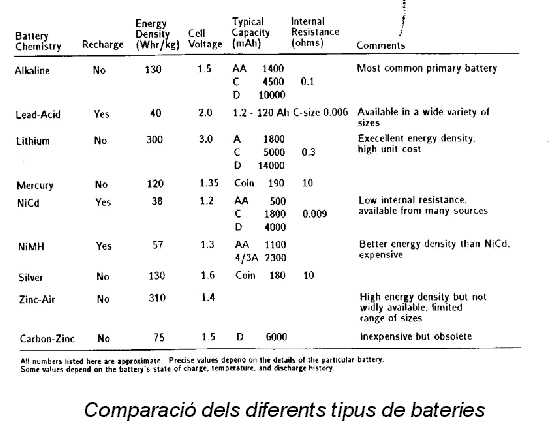
Bateries
Les bateries són la solució adoptada per emmagatzemar energia en robòtica. Una bateria converteix energia química en energia elèctrica
Convertidors DC-DC
A vegades es necessari disposar en el robot de diferents tensions dalimentació,
aquestes tensions es poden obtenir amb reguladors lineals o commutats
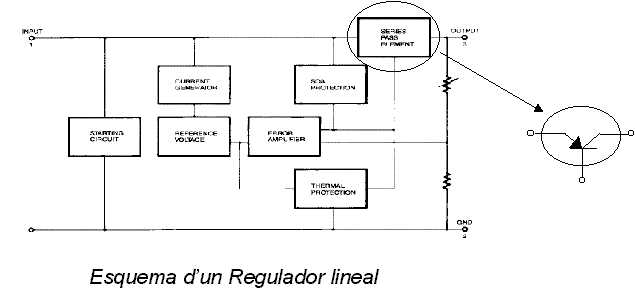
Els lineals tenen linconvenient de lelevada dissipació de
potència i que només són capaços dobtenir
tensions per sota la dalimentació.
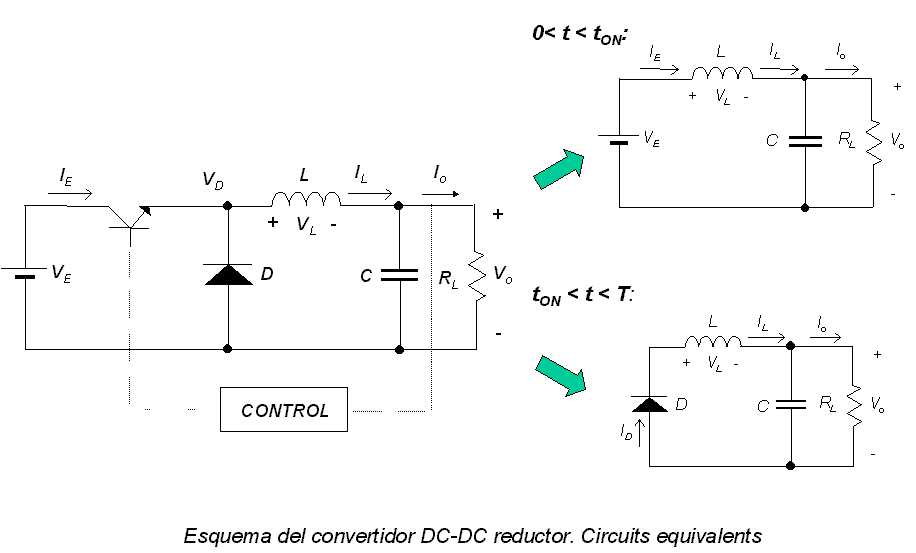
Exemple convertidor DC-DC reductor
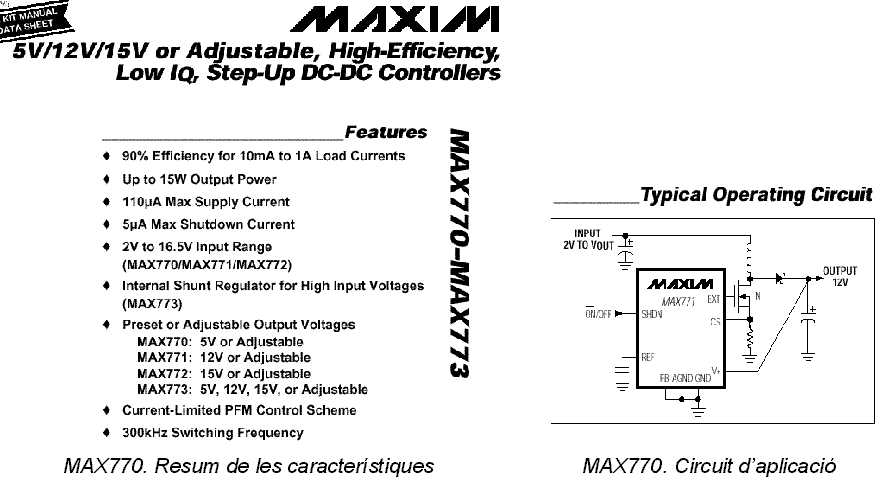
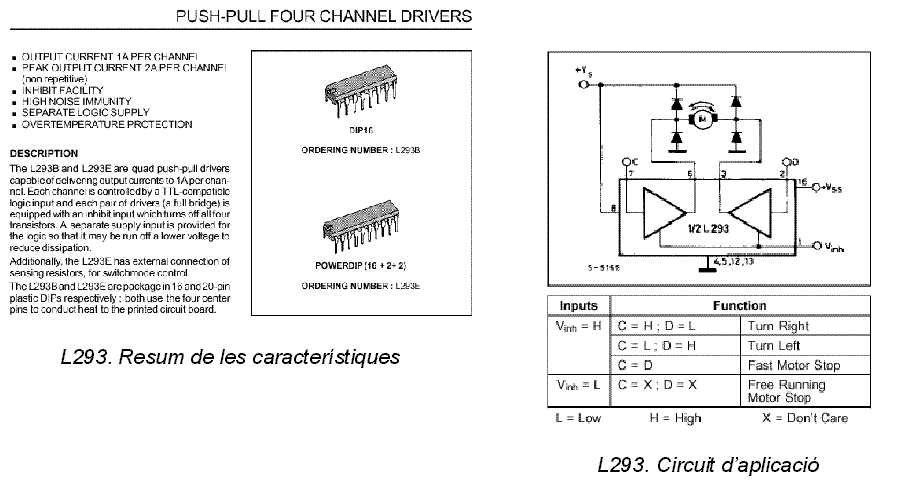
Alguns circuits integrats dinterès
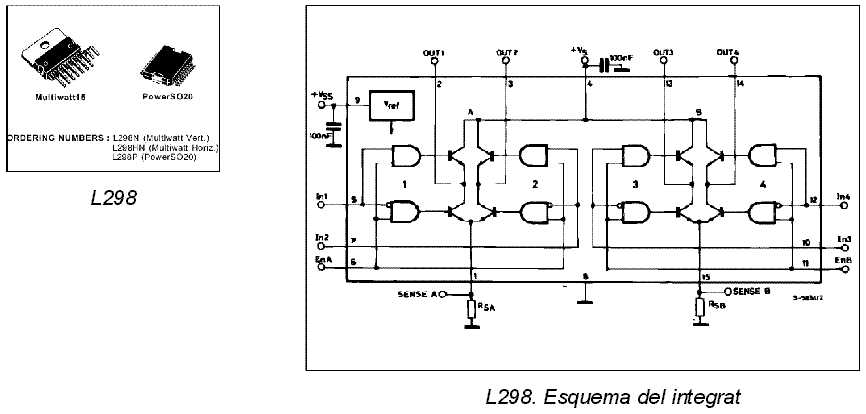
L293
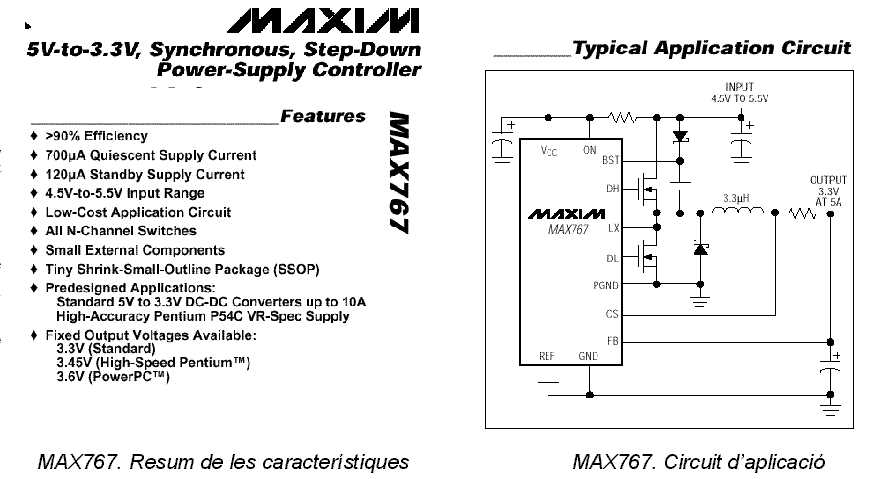
MAX767
MAX724

MAX770