 |
 |
 |
 |
 |
 |
El equipo Rogi Team (Robots de Girona) esta formado por profesores y estudiantes de la Universitat de Girona. Si haces click sobre las fotos, obtendrás una breve descripción de cada componente.
|
|
|
|
|
|
 |
 |
 |
 |
 |
Anteriores colaboradores
Presentación del equipo en el canal Arte
Secuencias de la presentación del equipo Rogi Team en el canal Franco Alemán de televisión Arte:

1- 4.661 Kb |

2- 6.327 Kb |

3- 6.638 Kb |

4- 5.179 Kb |

5- 3.275 Kb |

6- 2.144 Kb |

7- 3.854 Kb |
1- En la clase ante los alumnos.
2- Analogias con un partido de fútbol real.
3- Explicación técnica.
4- Explicación técnica II.
5- Un partido de fútbol robótico de demostración.
6- Durante una competición.
7- Entrevista y conclusiones finales.
Rogi Team 99

Tareas e investigadores asociados1. Análisis, especificaciones, diseño y dirección del subproyecto
Josep Lluís de la Rosa y Joseph Aguilar-Martin(*)Cubre el análisis global y planteamiento de las directrices del proyecto conjuntamente con la participación de todos los miembros del equipo. La coordinación además, abarca el control del proyecto, así como la realización de los diferentes informes y publicaciones, y asistencia a las reuniones de coordinación, que está convenientemente programados en la planificación temporal que mostramos posteriormente.
2. CACSD con toolbox de agentes
Albert Oller.Esta tarea cubre el objetivo número 1, donde se especificará las necesidades de representación agente en el nivel de cooperación (coordinación) que juntamente con el nivel supervisor decide las acciones (consignas) que los controladores deben ejecutar para operar sobre el sistema físico. Se utilizarán las facilidades de los lenguajes orientados a objeto que se han incrustado (embedded) en MATLAB-SIMULINK para prototipar las ideas que se desarrollen en términos de dicho análisis, del cual se obtendrá un conocimiento general sobre los requerimientos que debe tener un CACSD para el diseño de controladores y agentes en un mismo entorno homogéneo. Tomando en cuenta los precedentes de las toolboxes de fuzzy, neural, control robusto, etc que existen en MATLAB-SIMULINK se diseñará una toolbox de agentes para representar dichas ideas. Asimismo, para fundamentar el trabajo de prototipado de agentes físicos, se implementarán en dicho CACSD un modelo de comportamiento dinámico de robots móviles autónomos. Para esta tarea se requerirá de bastante software (licencias de MATLAB, WATCOM, drivers y compiladores adecuados para hardware industrial) y de hardware propio de informática industrial (estación de electrónica para diseño de circuitos que luego se utilizarán en los nuevos prototipos de la plataforma de robots y de la plataforma de supervisión industrial).
3. Supervisión en agentes físicos
Joaquim Armengol y Santi Esteva(*)Esta tarea cubre el objetivo número 3. Se estudiará las utilidades de los agentes en su capacidad de tratar sistemas complejos de supervisión mediante técnicas de consensus [de la Rosa, 1994] a base de combinar diversas capacidades de resolución de problemas, teniendo en cuanta que existe un referente mundial desarrollado en un proyecto ESPRIT llamado ARCHON, instalado en España durante 1992-94 [Wittig, 1991, Corera, 1996; Jennings, 1996?. Como que se puede enfocar dicho problema teniendo en cuenta que el agente físico es un sistema híbrido (parte discreta que opera sobre un sistema dinámico) siendo la parte discreta el mismo agente software en tareas de cooperación, y siendo el sistema dinámico la parte física hasta los controladores, entonces el nivel de supervisión será la interface adecuada existiendo investigación previa que resuelve dicho problema de adecuación nivel físico - nivel agente. Encaramos dicho problema con la ayuda del sistema SHIFT de simulación de sistemas híbridos de la UC at Berkeley con quienes colaboramos focalizando el trabajo en la comparación de los autómatas híbridos [Varaiya, 95] y los supervisores basados en el conocimiento, que nosotros introducimos en CACSD (véase trabajo previo explicado en el objetivo 1, resuelto en la tarea 2), analizando las posibilidades de extensión de dicha supervisión en el caso de ser aplicados a problemas distribuidos y cooperativos de sistemas autónomos.
El material que se necesita en esta tarea será de inventariable un PC y bibliografía especializada.
4. Aprendizaje de capacidades cooperativas
4.1 AGENT0 fuzzy y aprendizaje conexionista a nivel de consensus.
Esteve del Acebo.Utilizando el lenguaje orientado a agentes AGENT0 de [SHOHAM, 1990] se le incorporará la lógica difusa en el encadenamiento de reglas, lo que facilitará la utilización de trabajo previo en consensus y fusión de decisiones de sistemas expertos cooperantes presentado en [de la Rosa, 1994]. La representación del sistema de cooperación en términos de los parámetros de prestigio y necesidad es adecuada y representable en forma de reglas de AGENT0 (reglas de producción en forma de capabilities) y la adecuación de dicha representación paramétrica del mundo cooperativo tiene problemas de asignación inicial que se ha intentado resolver en [del Acebo 1997; de la Rosa, 1994] mediante la evaluación de la calidad de las bases de conocimiento que forman el agente software (parte software del agente físico). La aproximación conexionista o neural ha dado algunos resultados [de la Rosa, 1994] y fruto de la cooperación con la CMU [Stone, 1997] pretendemos concretar dicho aprendizaje en off-line, como pre-asignación de parámetros. El aprendizaje on-line sería una tarea pendiente que trabajaremos en un futuro.
4.2 Aprendizaje intencional.
Josep Xargayó y Josep Maria Humet(*)Utilizando el mismo lenguaje de programación orientada a agentes AGENT0 de esta tarea, planteamos una representación intencional (en términos de beliefs, committments, goals y capabilities), dicha representación del mundo cooperativo, propuesto en la literatura actual de agentes intencionales, documentado adecuadamente en el apartado de estado del arte de este proyecto, sugiere una clasificación de los acontecimientos que suceden en la evolución del mundo físico dentro de unos modelos a priori consistentes en reglas prefijadas que hacen matching ante dichos acontecimientos. Este aprendizaje por contraposición al de la tarea 4.1 no es conexionista y representa una corriente de investigación actual [Asada, 1997], con interesantes facilidades de interpretación simbólica del aprendizaje. Para dicho matching, entendido como interface numérico-simbólica, se utilizarán las facilidades de tratamiento de señales y de ayuda a supervisión [Meléndez, 1995] que tenemos desarrollado en MATLAB-SIMULINK .
El material que se necesita en esta tarea será de inventariable un PC y bibliografía especializada, y de fungible software de lenguajes de simulación.5. Benchmarks
5.1 Simulación de agentes físicos.
Albert Oller y Carles Gual.Complementaria la tarea 2, de forma más específica, se construirán simuladores de robots móviles autónomos y cooperantes en el simulador de la herramienta CACSD utilizada en este proyecto, así como también la simulación de la plataforma industrial de procesos continuos que aportamos a este proyecto. Dicha simulación será orientada a situaciones de referencia para ejemplificar y homologar la investigación en este proyecto. Dicho benchmark será un aspecto metodológico interno convenientemente documentado.
5.2 Agentes físicos y aplicabilidad industrial.
Albert Figueras y Esteve del Acebo.Esta tarea consiste en el análisis en detalle de analogías de sistemas industriales que requieran en un futuro de la aplicación de los agentes físicos, aparte de los que ya existen actualmente como pueda ser el en este proyecto ya muy referenciado ARCHON. Al tratarse este proyecto de investigación básica con motivación industrial se han de dedicar esfuerzos a este sentido, así como lo avala la comunidad internacional.
6. Diseño de agentes físicos (DAF) en casos prácticos
6.1 DAF con robots móviles autónomos.
Albert Oller y Carles GualSe aplicará dicho CACSD para diseñar agentes físicos sobre los modelos de simulación del benchmark desarrollado en la tarea 5.1. Para el prototipado de agentes físicos sobre robots con elevado grado de autonomía se utilizará en modelo de simulación en JAVA de la Universidad de Vigo.
6.2 DAF con sistemas de supervisión.
Josep Xargayó, Albert Figueras, y Carles Pous.Se aplicará dicho CACSD para diseñar agentes físicos sobre los modelos de simulación del benchmark desarrollado en la tarea 5.1, teniendo en cuenta los referentes de la tarea 5.2 sobre la aplicabilidad industrial de los agentes físicos.
7. Desarrollo y puesta a punto de la plataforma
7.1 Plataforma de robots móviles autónomos y cooperantes.
Albert Oller y Esteve del Acebo.Dicha plataforma será puesta al día en forma de una nueva generación de micro-robots dado que son fáciles de construir en comparación a las dimensiones y costes que representa los robots de la Universidad de Vigo. Por el contrario no son tan autónomos pero suficientemente complejos para la demostración de agentes físicos en tareas de cooperación. Se partirá de la 2ª generación de equipo micro-robótico que se ha construido en la CICYT TAP97-1493-E. Para su actualización teniendo en cuenta el benchmark desarrollado en simulación en la tarea previa 5.1 y con la preparación de los agentes físicos de la tarea en paralelo 6.1 se deberá utilizar bastante material fungible (sensores, actuadores, microprocesadores, y otros componentes convenientemente detallados en los presupuestos) y pequeño inventariable (targetas, cámaras, etc).
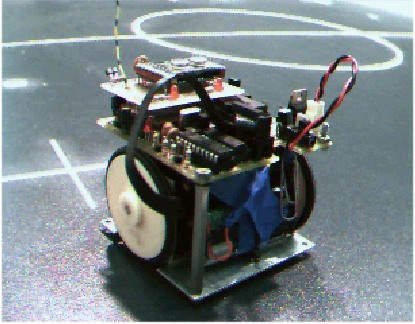
Primer prototipo de micro-robot móvil autónomo y cooperativo presentado por la UdG al primer campeonato científico del mundo MIROSOT96 celebrado en Corea y posteriormente en 1997 MIROSOT 97 y la RoboCup1997 en Japón
7.2 Plataforma de investigación en sistemas de supervisión.
Josep Xargayó, Joaquim Armengol y Joan Puigmal.Dicha plataforma será acondicionada para la experimentación de este proyecto, or el contrario no son tan autónomos pero suficientemente complejos para la demostración de agentes físicos en tareas de cooperación. Se partirá de infraestructura concedida CICYT TAP IN96-0154 de infraestructura de investigación Planta Prototipo de Producción Industrial para Experimentación y Tele-operación compartida. Para su actualización teniendo en cuenta el benchmark desarrollado en simulación en la tarea previa 5.2 y con la preparación de los agentes físicos de la tarea 6.1 y 6.2 se deberá utilizar bastante material fungible y pequeño inventariable a semejanza de la subtarea 7.1.
8. Explotación y mantenimiento de la plataforma
Josep Lluís de la Rosa y el equipo de investigadores de este proyecto.8.1 Demostraciones a la EPO.
Se tomará las empresas que seleccione la Federación de Organizaciones de Empresas de Girona (como EPO de este proyecto) para demostrar los resultados del proyecto convenientemente ejemplificados con las plataformas acondicionadas en la tarea anterior.
8.2 Desarrollo de experimentos. Documentación y defensa del proyecto.
Actos orientados a la concreción documental de los experimentos de la investigación propuesta en este proyecto, donde las sugerencias de las empresas de la EPO serán incluidas. Creemos muy importante explicitar este feed-back de las empresas como valoración final en la documentación generada por este proyecto, y que ha de servir para canalizar la investigación futura con las herramientas y prototipos creados.
(*) Personas que no figuran en este proyecto por incompatibilidad horaria, pero han participado y participarán activamente.
Presupuesto de funcionamiento del equipo de futbol robótico. (download)
Coincidencias con otros grupos en España
Hasta donde tenemos conocimiento, el tema de multi-agentes ha sido abordado, desde el punto de vista de las aplicaciones industriales, en LABEIN (Bilbao) en el marco del proyecto ESPRIT (II programa marco) denominado ARCHON, que es un referente de primera magnitud en la escena internacional, con publicaciones aquí mencionadas como [Wittig 91; Corera 96; Jennings 96]. También los grupos de Universidad Politécnica de Madrid, de Telefónica I + D, la Universidad Autónoma de Madrid, así como el IIIA (Instituto de Investigación en Inteligencia Artificial) de Barcelona trabajan en este tema en el marco de las aplicaciones de agentes. En el ámbito más general de la Inteligencia Artificial Distribuida hay varios grupos trabajando en las distintas Facultades de Informática de nuestro país, así como en el Instituto de Ingeniería del Conocimiento en Madrid.
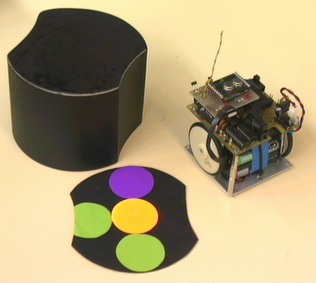
Imagen actual de un robot futbolistaEn cambio, no se conocen grupos en España que aporten la dimensión de agentes físicos en su investigación, aunque hay indicios de aproximaciones mediante la robótica móvil. Los estudios de cooperación de robots se simplifican habitualmente a 2 robots que desarrollan tareas que requieren de un control coordinado que no es objeto de este estudio en este proyecto, como hay un trabajo de la UPC en robótica submarina. La problemática de la representación de los agentes físicos aparece al tener que desarrollar su trabajo más de dos robots móviles autónomos. La concepción de utilizar entornos CACSD (como pueda ser MATLAB-SIMULINK) para el diseño de agentes físicos conjuntamente con los controladores es original y estamos publicando los resultados de esta investigación en revistas internacionales. El aprendizaje de agentes físicos lo desarrolla la universidad de Carnegie Mellon [Stone, 1997] basándose en el conexionismo, y aproximan el aprendizaje desde la habilidades individuales hasta las cooperativas, cosa que es complementaria con nuestro enfoque basado en la representación explícita mediante lenguajes orientados a agente del proceso de aprendizaje a nivel de creencias. Los desarrollos conjuntos control-supervisión-agentes, cosa que creemos haber justificado largamente su necesidad, es altamente novedoso. Además, la participación española en las importantes conferencias internacionales de IJCAI dentro de los prometedores RoboCup y la FIRA, en robótica móvil con sistemas autónomos y cooperantes, es prácticamente nula, solamente existiendo una tímida participación a nivel de simulación de agentes de la Universidad Carlos III. Nuestra participación como único representante español en el 1º Concurso Internacional de Fútbol Micro-robótico (MIROSOT96) que se celebró los días 9-12 de Noviembre de 1996, en el 2 concurso MIROSOT97 los días 1-5 de Junio, y el primer mundial de RoboCup los 23-29 de Agosto de 1997 en Nagoya, Japón, refleja la necesidad de impulsar investigaciones ligadas a los agentes físicos para que nuestro país tenga presencia internacional en un tema que se considera tan prioritario dentro de la convocatoria de este año 1997, tal como es la robótica móvil y su aplicaciones no convencionales, que están tan bien ejemplificadas con la plataforma de experimentación (demostración) que promueven dichas prestigiosas y pujantes organizaciones internacionales inicialmente sitas en Asia.
 |
 |






