|
Josep Lluís
de la Rosa
y componentes del Rogi Team y
del equipo de supervisión
|
 |
| DAFne (Disseny d'Agents Físics) |
|
Josep Lluís
de la Rosa
y componentes del Rogi Team y
del equipo de supervisión
|
|
Experimento con el controlador natural, selectivo, supervisión y diseño de agentes físicosEl experimento se propone de hacer se sitúa dentro de una investigación con una triple motivación: primero, dar sentido físico a los lenguajes orientados a agentes (capabilities) y analizar las herramientas de ayuda en el diseño de agentes físicos (DAFne), segundo, favorecer la supervisión que facilite la representación de dicho sentido físico, posiblemente resoluble con sistemas híbridos, y tercero, favorecer el análisis y diseño de supervisores mediante una mejor representación de las especificaciones y limitaciones de diseño e implementación de los controladores, utilizando inicialmente técnicas de control selectivo y el control natural.
1. Nivel de Control de Sistemas Dinámicos
Los robots móviles y autónomos de la Universidad de Girona & LEA-SICA se comportan como sistemas dinámicos pudiéndose interpretar como las siguientes funciones de transferencia
Hay también representación de estado. Con una sencilla convolución con una función de transferencia que coloree dichos modelos podremos introducir un comportamiento marcadamente dinámico con un predominio de la inercia en los movimientos de dichos robots, a semejanza a como se comportarían sistemas autoguiados de alto tonelaje con actuadores (motores) subdimensionados.
Al tener en cuenta dicha representación de modelo tanto en representación externa (función de transferencia) como interna (representación de estado) vemos que se pueden diseñar controladores lineales de velocidad, posición y de orientación, pudiendo comprobar la bondad de los diseños, y se facilita la comparación de soluciones de control.
Paquete propuesto de análisis y diseño : MATLAB-SIMULINK.
Técnicas Alternativas de Control inspiradas con el comportamiento humano: fuzzy, cualitativo y natural.
Experimento: 1. Control de posición y ángulo de un robot móvil con especificación de limitaciones físicas (aceleración máxima, saturaciones del actuador, y en menor importancia la posible limitación de velocidad).
Motivación de la investigación:
Adicionalmente para los niveles superiores
- Para solucionar una trayectoria libre los ingenieros (típicos como los de la Universidad de Girona & LEA-SICA) aplicaron PIDs con un resultado satisfactorio aunque incompleto tanto en términos de no poder especificar correctamente la precisión, tiempo de ejecución y las limitaciones físicas que se quería (limitar la velocidad y la aceleración) o disponían (saturaciones de los motores y problemas de localización absoluta).
- El control natural, y su evolución hacia el control selectivo, soluciona dicha representación y ayuda a la síntesis de controladores teniendo en cuenta de forma explícita dichas limitaciones físicas o especificaciones. Dicho conocimiento no analítico es explícitamente representado. En principio no está pensado para solucionar el problema de la localización absoluta el que bien puede tratarse como ruido inyectado a un sistema dinámico convencional.
- Otras técnicas de control avanzado han sido aplicadas a este problema, donde con un nivel de conocimiento analítico (modelización) la técnica a aplicar (control óptimo, entre otras) se ha aplicado con unos resultados presumiblemente mejores que con los PID. En el caso del control óptimo tiene carencias por su dependencia de modelos no lineales, pero tiene virtudes por tener en cuenta especificaciones de tiempo mínimo y restricciones en el diseño y síntesis del controlador.
- Esta experimentación vendrá avalada por una experiencia práctica, así como la comparación en términos de facilidad de síntesis, implementación, capacidad de representación de las restricciones, no linealidades y preservar la integridad (coherencia) de los controladores diseñados. Éste último punto ayuda a una mejor supervisión.
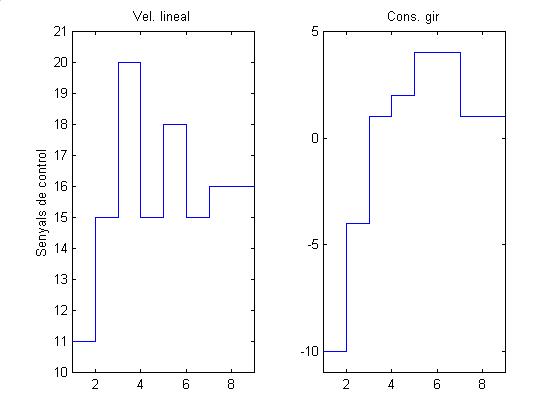
Para todo ello se propone la Ejecución de trayectorias sin obstáculos como experimento. Se generarán las consignas (queda pendiente si incorporar o no un PID en cascada que linealice dichas consignas y las convierta en voltaje) de velocidad de los motores a partir del estado actual del robot expresado en posición (x,y) y ángulo a absolutos, hasta su estado final. En la implementación de los controladores un estimador combinado de encoders y sistema de visión suministrará la posición y la orientación actuales del robot. Posiblemente se incorpore una brújula magnética. El objetivo del experimento se centrará en el estudio del movimiento controlado del robot en diversas situaciones del entorno, es decir, en diversas configuraciones dinámicas iniciales y finales. Para ello hay que tener en cuenta las saturaciones de la acción de control expresada en los dos motores (en velocidades o tensiones positiva y negativa máximas), y la limitación de las aceleraciones lineales y angulares para preservar la linealidad del modelo del sistema, lo que significa preservar la bondad de la ejecución de los diseños de los controladores.Para diseñar el supervisor parece que el control natural es más supervisable que otros controladores, lo que facilitaría el diseño de supervisores desde la misma concepción y diseño del controlador (natural), en comparación a otros controladores. Dicho supervisor incorporará aspectos de control híbrido para mejor representar las limitaciones físicas del sistema: la realizabilidad física de diversas trayectorias. Las especificaciones se pueden obtener de tener en cuenta que el objetivo del robot es alcanzar en todo momento la posición de la pelota con una determinada orientación y dentro de un tiempo especificado (opcionalmente, el tiempo óptimo). Las mismas especificaciones puede imaginarse que pueden aplicarse en una situación de juego real, la posición de dicha pelota podría asociarse a un posicionamiento concreto, por ejemplo, un movimiento defensivo o de protección de la portería. Eso, se decidirá en el futuro uso para la competición futbolística, y por ahora no nos interesa en nuestra experimentación en investigación.


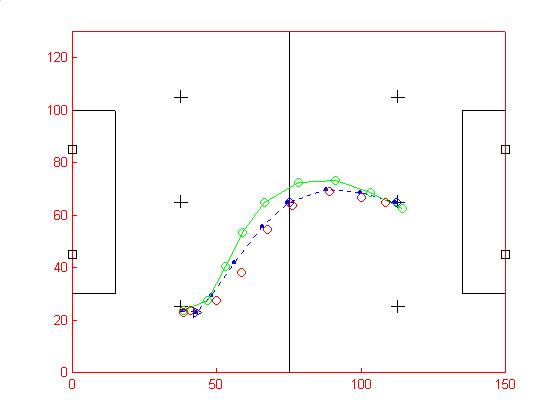
Un ejemplo desarrollado en 1999 es el de Paco Gamero donde se aplica el control predictivo para el robot movil. A continuacio vemos las trazas de ejecucion de dicho robot: los puntos solidos unidos por una linea de puntos representan la trayectoria especificada para el robot i en circulos no unidos por ninguna linea vemos la trayectoria ejecutada realmente. Vemos que aunque se ha ejecutado en este ejemplo realmente bien con bastante precision; las diferencias entre la real i la propuesta pueden ocasionar colisiones si esta trayectoria intentase esquivar un obstaculo. Sabemos de todas formas que podemos a una cierta velocidad ejecutar correctamente dicha trayectoria, pero no sabemos que tal ira el controlador a otra velocidad de consigna.
La supervisión también puede realizarse con dicha plataforma de experimentación de MICRO-FUTBOL. La ejecución de un horizonte de consignas puede monitorizarse y después analizarse con herramientas SCADA, donde la representación de la información para el operario adquiere una relevancia muy alta. La generación de alarmas de funcionamiento y la detección de fallos pueden trabajarse con los pequeños robots al tratarse de sistemas dinámicos con un comportamiento secuencial que permite interpretarlos tanto como un sistema dinámico continuo como discontinuo (autómata secuencial o guiado por eventos).
Paquete propuesto de análisis y diseño : MATLAB-SIMULINK y LABWINDOWS
El sistema compuesto por el grupo de robots el ordenador central y el sistema de visión, contiene una complejidad asociada que puede generar una cantidad importante de errores. Igualmente, la alta cantidad de información que se genera es de difícil tratamiento a nivel de diagnóstico de forma que resulta imprescindible la introducción de herramientas de monitorización del proceso.
Adicionalmente para los niveles
superiores
En consecuencia, este proyecto presenta una investigación
básica con una nueva tendencia de la automática, llamada
sistemas híbridos, la cual proponemos como solución a la
problemática originaria de otra nueva tendencia en el prometedor
campo llamado sistemas agentes cooperantes. Los agentes tienen severos
problemas de representación y ejecución cuando se aplican
a uno de sus naturales campos de aplicación, que son los robots
móviles autónomos y cooperantes, dadas las características
de sistemas dinámicos de variable continua que presentan dichos
robots. Para la puesta a punto de dicha investigación de calidad
se pretenden representar y abordar dicho reto científico y tecnológico
sobre robots autónomos móviles y cooperantes que son de naturaleza
muy similar al autoguiado de automóviles, tema de investigación
de un equipo de investigación norteamericano (de la Universidad
de California en Berkeley). La emulación de los autoguiados ofrece
una complejidad muy interesante ya no sólo a nivel científico
sino a nivel industrial y social, hecho que se ha propuesto como una importante
Horizontal Task Force, antesala del V Programa Marco de la Unión
Europea. Para poder desarrollar tal investigación la cooperación
entre dichos equipos de investigación compartiendo su posición
privilegiada en la escena internacional en sistemas híbridos (los
norteamericanos) y en la problemática de control automático
de robots móviles autónomos cooperativos (los españoles)
se impone necesaria. Los trabajos en cooperación hispano-norteamericana
se centrarán en el intercambio de tecnología en sistemas
híbridos y agentes (software) y tecnología de control automático
de robots considerados como sistemas dinámicos (estado y tiempo
continuos), que ambos equipos de investigación poseen en la actualidad,
profundizando en la concepción de sistemas agentes cooperantes mediante
técnicas basadas en sistema híbridos que serán convenientemente
ejemplificados con dichos robots.
La supervisión de sistemas híbridos desarrolla el campo de los sistemas basados en eventos hacia el campo de los sistemas basados en el conocimiento, con una aportación a la supervisión de sistema dinámicos y variantes en el tiempo. Sistemas altamente cambiantes y no deterministas, que obligan a optimizar el tiempo de exploración en la búsqueda del recorrido óptimo, y en sistemas híbridos sus consecuentes controles óptimos locales, tema todavía no resuelto. Hay un excelente trabajo de la Universidad de Berkeley representado por SHIFT. Para ejemplificar esta investigación se partirá de robots móviles autónomos que se comportan como sistemas dinámicos de variable continua, y se procederá a estudios de extensión de los sistemas híbridos en su aplicación a la toma de decisiones autónomas de los robots móviles teniendo en cuenta que trabajan en cooperación con otros robots supervisados a su vez con sistemas híbridos.
Esta investigación se manifiesta como una investigación básica de gran interés e innovación dada las grandes expectativas que los sistemas agentes ha despertado en la década de los 90. Su aplicación a robots móviles autónomos es muy limitada si no se resuelven previamente aspectos de sistemas híbridos, tema de este apartado del proyecto global de investigación.
Objetivos científicos
del nivel de supervisión
Monitorización del proceso.
Se utilizará una herramienta SCADA para visualizar los movimientos de su robot en la pantalla del ordenador. Dicha pantalla mostrará un esquema del campo de juego y una figura representativa del robot y de la pelota. Asimismo, podrá comparar la trayectoria real que sigue con la que él ha calculado. De esta manera podrá observar las diferencias entre las dos trayectorias. Igualmente, dispondrá de una pantalla adicional para observar los diversos los mensajes que se envían al robot así como una representación gráfica del movimiento que representa. Estos experimentos serán posibles de hacer a distancia desde Tolosa. Actualmente hay en la dirección IP 130.206.124.15 la monitorización remota en fase de pruebas.
Modelización del sistema híbrido
Hay varias situaciones que convendría modelizar teniendo en cuenta que el supervisor híbrido tiene en cuenta la realizabilidad física de ciertas trayectorias entendidas como secuencias de puntos (estados) por los que un robot móvil autónomo y cooperante debe transcurrir, y PRESERVANDO LA COHERENCIA del diseño de los controladores que ejecutan dichas trayectorias. Inicialmente sin tener en cuenta que debe comunicarse con el nivel agentes, o que ni siquiera hay que introducir la noción agente dentro de los árboles de decisión del supervisor híbrido.
Luego hay varios casos:
Y combinaciones de dichos casos. La problemática
es suficientemente representativa y representa un reto a dichos supervisores
híbridos.


I -1 GENERAL STRUCTURE OF PROCESS SUPERVISION
The role that should play Artificial Intelligence tools, and particularly Expert Systems, in Supervision of Automatic Control Systems is considered here. Usually systematic tasks as regulation or schedule execution are devoted to special control devices as PLCs or PIDs. Human operators, from the "control-room" supervise and react according to their knowledge and experience. Expert systems may partially replace those tasks and help the human operator by managing a convenient dialogue.
The diagram of figure 1 explicates the different levels of control, from the process to the human operator [J. AGUILAR-MARTIN, Ph. DESROCHES & C. BOREL, 1989]:
LEVEL 0: INSTRUMENTATION: The sensors and actuators deliver instantly information about the process using physical supports, usually electrical. This information is most of the time transformed into numerical or digitized values given to the level 1.
LEVEL I: CONTROL: The control devices take the numerical or analogic information from LEVEL 0 and process them in procedural routines. Direct control actions are taken after computing in real time (immediate response analogous to the reflex actions in animals).
LEVEL II: MONITORING: At this level the information from the process and the control devices is stored, manipulated and dispatched in order to give a convenient answer to the possible interrogations by the human operator, or "conductor" who supervises (conducts) the process. For this purpose the MONITORING LEVEL must handle databases, graphic displays and communication protocols.
LEVEL III: SUPERVISION: This task manipulates symbolic information used in declarative programmed units. Decision making responses are produced after reasoning in human-like time (response after reflexion delay).
Levels of control and information natures in a complete
supervised system
I -3 GENERAL PRINCIPLES OF KNOWLEDGE BASED SUPERVISED CONTROL
Control of dynamic systems has evolved from the first Watt's regulator, through servomécanisms to very complex closed-loop. Mendel and Zapalac in 1968 considered already the application of Techniques of Artificial Intelligence to Control [J.M.MENDEL & J.J.ZAPALAC, 1968], and quoted Gibson in [J.E.GIBSON, 1963]: "If a hierarchy of Control were established, open loop control would occupy the lowest place. Next comes conventional closed-loop control. Above this may be placed adaptive control, ... Finally we might envision a still higher level of automata that is equipped with the ability to recognize familiar factors about a situation and to use stored information to cope with these situations. "
Those upper loops were named "self-organising" , and to implement learning abilities was considered the first step. It appears nowadays, with the development of reasoning-like computer tools, that before the implementation of true learning functionalities can be developed, an intermediate place in the Gibson's hierarchy should be filled by a supervisory level, where recognition and evaluation of situations are followed by an expert reasoning leading to decision.
DEFINITION: A knowledge-based supervisor is a system whose prime task is to evaluate the quality of the current situation of a dynamical system. Its second task is to act, or to propose an action to an operator, upon the system so that its future behaviour leads it to acceptable or satisfactory situations.
The general aim of supervised systems is to evolve towards some desired output states in spite of local goals or criteria imbedded in the optimal controllers. This violation of criteria introduced in the design of control devices is necessary for the second task of the supervisor, i.e. to modify the behaviour of the system in a way not predicted by the control. Intrinsic incoherence is obviously the main danger of a procedure that authorises on line modification of criteria and goals; this must therefore be supported by an expertise on the process and its control. In order to use the standard results of Control Theory, many features of real systems are usually not taken in account by classical controllers: inequality constraints, changes of models, modification of objectives, emergencies, ... Supervised Control should therefore be able to handle this information.
Many choices may be done for the practical implementation of Knowledge Based Supervisors, before further proceeding, it is necessary to state the limits of this study, that tries to help but not to restrict for the achievement of further realisations. The main principles that lead this study are the following:
1) Supervisor deals with symbolic information.
2) Supervisor has a time response slower than the CDS
(Controlled Dynamic System), its time base is different, though anchored
to that of the CDS
3) Supervisor disposes of three sources of information:
CDS, simulation models and past running data stored in an evolutive database
4) System, Controller and Supervisor are to be described
in the formalism of Mathematical Systems Theory.
III LOGICAL ASPECTS OF SUPERVISED CONTROL
In this section an attempt to the general formulisation of supervision taken as a problem of symbolic feedback control is formalised following the approach in [M.SAMAAN, M.DUQUE, M.M'SAAD,1989] and in [M.SAMAAN,1989]. A "Supervision Machine" or machine SM, is a formal automata that must exhibit logical properties that can be expressed by propositions about the identified variables in a general dynamic system.
Formal systems are built to realise logical mechanisms as automatic reasoning in Diagnosis, or selection in Pattern Recognition. In the particular case of Real Time Supervision of Dynamic Systems, a main constraint is the obligation of giving a response at each instant of the time base, a second constraint is the only available information to work with, i.e. the external observable variables of the dynamical system.
As shown in fig 5 the only possible actions upon the system are conveyed by the observable input w° or by the adjusting parameters q° and qf, represented by a unique parameter q. The machine SM must take in account the quality criteria or constraints expressed by the expert knowledge about the behaviour of the system. This has been stated in the following theorem and characterises this machine SM:
THEOREM: Let us explicit the following hypothesis about the function of SM:
- SM installs a dialogue with the process
to be supervised
- SM evaluates criteria and constraint satisfaction involving
variables u, x, y, q.
- SM is autonomous.
Let X* be the set of admissible sequences
x* of any variable x.
Then SM realises F1, F2, F3, if and only if the following
predicate is decidable:
![]() (i)
(i)
Proof: Decidability of P means
that either the exitence of the sequences ![]() and
and ![]() is guaranteed,
or their non existence is sure, i.e. P is true or P is false.
is guaranteed,
or their non existence is sure, i.e. P is true or P is false.
If P is true the constraints are satisfied
and therefore constraints are positively evaluated, if P is false no ![]() entails
entails ![]() , then
, then ![]() and
and ![]() , therefore
constraints are certainly not satisfied and are negatively evaluated, so
in both cases F2 is fulfilled and the machine is an autonomous automata.
, therefore
constraints are certainly not satisfied and are negatively evaluated, so
in both cases F2 is fulfilled and the machine is an autonomous automata.
Conversely if F2 and F3 are fulfilled,
then obviously for any observed sequence ![]() the machine SM knows the truth of P, and if SM is autonomous this is true
for all possible observation sequences.
the machine SM knows the truth of P, and if SM is autonomous this is true
for all possible observation sequences.
It is suitable to define several properties of a dynamic system directly related to the fundamental predicate.
DEFINITIONS:
Supervisability: If ![]() is true, it is said that the process is supervisable in the set of all
possible triplets
is true, it is said that the process is supervisable in the set of all
possible triplets ![]() .
.
Z*-Supervisability: If this property is restricted to a subset of measurable outputs Z* c Y* , the process is Z*-supervisable. An external observer may detect if the sequence is in Z* in order that the system could be controlled.
S-Controllability: If ![]() such that for any
such that for any ![]() the controlled process is supervisable it is said X-controllable,
if this is true for any subset X* of
the controlled process is supervisable it is said X-controllable,
if this is true for any subset X* of ![]() ,
it is
S-controllable that means that the system can de driven so
that its trajectories are in any given domain of the state space.
,
it is
S-controllable that means that the system can de driven so
that its trajectories are in any given domain of the state space.
III-2 FEEDBACK (Skolem functions)
Control level Skolem function: A main criticism to theoretical logic considerations, as the ones made in the last section, is the lack of constructibility of its results as far as they involve existential quantifiers, that is the case of the fundamental predicate shown here. To overcome this criticism a way must be found to suppress those quantifiers: this is called, in theoretical Logic, Skolem reduction. Skolem functions, in this context, are functions that express variables under existential quantifiers by other variables submitted only to universal quantifiers, or by constants. Whenever a Skolem function can be constructed a feedback can be implemented.
The Skolem functions introduced here are
control functions that yield internal variables from external variables
and adjusting parameters, if those last are fixed by ![]() , x variables can be expressed by the Skolem function ),
, x variables can be expressed by the Skolem function ),![]() and
and ![]() becomes:
becomes:
![]()
then by relaxing the value of the parameter
q* we get a new form of P, for controlled systems, where remains only one
existential quantifier on ![]() :
:
![]() (ii)
(ii)
For controlled systems another essentially constructive property may be defined, considering incremental time intervals. Let x*(t1,t2) be a sequence of the variable x in the time interval [t1,t2), then in [0,t) proposition (ii) can be written:
![]() (iii)
(iii)
If proposition (iii) is true it is said that the system has Incremental Supervisability. Incremental supervisability is needed to construct dynamical, or real time, supervisors.
Supervision level Skolem function: If the system is supervisable, proposition (i) holds, i.e. P is true; if the system is controlled P can be written in the form (ii). If moreover it is incrementally supervisable (iii) holds. To yield q(t) through a Skolem function it is necessary to take into account the pencil structure shown before. A partition of the set of external variables and adjusting parameters follows, and produces the three vectors:

The vector ![]() is the information vector were y* is included, and a function that determines
is the information vector were y* is included, and a function that determines ![]() uniquely from past sequence
uniquely from past sequence ![]() of
of ![]() , is called
supervision Skolem function
, is called
supervision Skolem function ![]() ,
and therefore the predicate P takes the form (iv) and becomes completely
constructible, as there are no existential quantifiers.
,
and therefore the predicate P takes the form (iv) and becomes completely
constructible, as there are no existential quantifiers.
![]() (iv)
(iv)
III-3 FUNCTIONAL SPECIFICATION OF THE SUPERVISION MACHINE
We propose here a general structure of a machine SM or Supervisor that takes into account the different kinds of information encountered in the practice of industrial processes. The potential use of Artificial Intelligence tools is enhanced, as they are particularly well conditioned for realising the symbolic and logic functions needed.
From the quantitative part of the information vector, an evaluation of the sequence f* will be given in a symbolic form. Then this machine will propose a decision materialised by a choice of a value for the adjusting parameters vector q. The following functions appear in the structure shown in figure 6:
General structure of a Supervisor
Figure.6
- Measure: generates the sequences
f*
to be evaluated
- Recognition: sequences f* are to be evaluated
and recognised as members of known subsets, labelled by lexical values,
it transforms the sequences f* into lexical variables
- Interpretation: A mapping from lexical
variables into a semantic world where situations are characterized, it
assigns meaning to well formed lexical variables
- Reasoning: a function
that connects interpretation and decision to the knowledge about the process
in order to solve the inference problem and realise the supervision Skolem
function described in III-2.
- Decision: Decisions will follow a resolution
mechanism from interpreted situations and finally applied to the adjusting
parameters q, it assigns numerical values to adjusting parameters q.
- Action, it applies to the actuators the
selected values`
Supervision of physical processes connects quantitative information from sensors and actuators with the expert knowledge of the user or operator that are usually expressed using logic-symbolic elements. Modern linguistic theory after [F.de-SAUSSURE, 1973], defines a linguistic variable as a pair {x,?}, where x is a lexical variable and ? its meaning, i.e. an element of a semantic space. The following distinction must be pointed out:
Quantitative variables: integer
or real numbers
Lexical variables elements of a language
Linguistic significant symbols, modalities
Quantitative variables are simple or complex (vectors or sequences). Lexical variables are isolated symbols, (word, letter), or articulated sequences (phrases, predicates); the supervision machine SM is an automata and therefore well formed lexical variables will be recognised by its formal grammar.
A subset of linguistic variables such
that any variable can replace any other in a given context such that the
expression remains well formed, or recognisable, will be called linguistic
paradigm,
only the meaning may change, i.e. it induces a possible modification of
the semantic reference.