DPA2:
Una Arquitectura per a Agents Físics Dinàmics
Albert Oller i Pujol
Dep. d'Eng.Elèc.Electrònica i Automàtica.
Grup de Robòtica i Visió Intel·ligents.
Universitat Rovira i Virgili.
aoller@etse.urv.es
|
Josep Lluís de la Rosa
Institut dInformàtica i Aplicacions (IIiA).
Universitat de Girona.
peplluis@eia.udg.es
|
Resum. En aquest article es presenta una
arquitectura per a permetre el disseny dagents físics amb dinàmica
pròpia. Aquesta arquitectura mostra lagent com a una entitat modular
amb tres nivells dabstracció: mòdul de control, mòdul
supervisor i mòdul agent. El funcionament de larquitectura es basa
en dos processos bàsics per a cada mòdul: el procés
dintrospecció i el de control, i en un protocol de diàleg
intermodular que permet lintercanvi dinformació entre els mòduls.
També es mostren dos exemples daplicació que mostren alguns
resultats preliminars.
Paraules clau: Agents Físics, Control, Arquitectura
orientada a Agents, Robòtica Mòbil.
1 Introducció
El treball amb sistemes multi-robot és prou ampli
com perquè hi tingui cabuda laplicació de conceptes de letologia
animal, de la teoria de lorganització, laprenentatge, i de la
Intel·ligència Artificial (IA). En concret, la coordinació
i la interacció de múltiples robots (comportament col·lectiu)
sestà estudiant en el camp de la Intel·ligència Artificial
Distribuïda (IAD), a partir del concepte de lagent software. A la
literatura podem trobar diferents definicions del comportament cooperatiu
però la clau està en entendre la cooperació com a
un associar-se amb els demés per obtenir un benefici mutu (recompensa,
interés comú, disminució dun index de cost). És
en aquest punt on apareixen diverses qüestions relacionades amb el
problema de lanàlisi i del disseny de sistemes multi-robot (multi-agents
autònoms): la descomposició i distribució de tasques,
la robustesa i tolerància a les fallades, la correcció de
levolució del sistema, o la mesura per quantificar la quantitat
i/o la qualitat de la cooperació.
Els agents autònoms que porten a terme tasques
en entorns multi-agent dinàmics han de cumplir els requisits que
imposa el funcionament en temps real i el món real [7]. Alguns daquests
requeriments són els següents:
Saber-se comportar dacord a les circumstàncies (situated
behavior), i reaccionar davant esdeveniments no previstos.
Tenir un comportament dirigit cap a un objectiu (goal-directed
behavior) i saber seleccionar les accions en funció daquests objectius.
Les tasques shan de realitzar amb eficiència tot
i tenint en compte les imposicions restrictives del treball en temps real.
Han de tenir present la presència daltres agents.
El principal problema està en com es poden integrar
aquests requeriments en una arquitectura agent. Tot i que hi ha diversos
treballs en aquesta direcció [7][6], encara hi ha un problema bàsic
que no ha estat ni resolt ni plantejat. Tenint en compte que el mot dinàmica
es refereix tant a rapidesa del canvi de lentorn com a la dinàmica
del cos de lagent físic, la qüestió que es planteja
en aquest treball és com queda especificat un agent físic
dinàmic, o quines són les especificacions mínimes
necessàries per englobar tots els requeriments abans esmentats en
una sola arquitectura?
A la secció 2 es fa una extensió del concepte
dagent software cap al dagent físic i, posteriorment, es defineix
lagent físic dinàmic. La secció 3 descriu lestructura
i el funcionament de larquitectura DPA2 i la secció
4 mostra dos exemples on sil·lustra com saplica larquitectura.
2 Extensió del concepte dagent software
al concepte dagent físic dinàmic
Dacord amb les especificacions de la Foundation for
Intelligent Physical Agents [4], un agent és lactor fonamental
en una plataforma agent (AP) la qual combina un o més capacitats
de servei en un model dexecució integrada i unificada que pot incloure
laccés a programari extern, usuaris humans i servei de comunicacions.
Cal que lagent estigui registrat en una plataforma per tal de poder interactuar
amb els agents de la mateixa plataforma o duna altra. Un AP conté
tres conjunts de capacitats: ACC (Agent Communication Channel), AMS (Agent
Management System), i DF (Directory Facilitator). Aquestes són les
especificacions que donen lloc al model de referència en què
els agents software treballen i existeixen.
2.1 Agents Software: Model Agent de Referència
Lagent FIPA existeix físicament en una AP i usa
els serveis que li ofereix. Cal observar que el terme físic es
refereix a linfrastructura física en què els agents es despleguen.
Feta aquesta observació, la pregunta que ens plantegem és
on es pot introduir el concepte del cos de lagent físic?
Fig. 1: Esquema dun sistema multi-agent (agents software)
Com a explicació informal del funcionament dun
agent software podriem donar la següent:
Definició 1: funcionament dels agents software.
Suposant que un agent és incapaç de portar a terme una tasca
tot sol, obtenim que cada agent ha de recòrrer als altres per obtenir-ne
ajuda. Aleshores, cadascun dells ha de decidir el següent: a quin
altre agent puc ajudar? Fins on arribarà el meu compromís
envers laltre agent? Sota quines condicions puc fer-ho? Tot i que la decisió
final podrà ser reactiva o deliberativa, quan lagent que es compromet
ha de saber el que impliquen els seus compromisos. En altres paraules,
ha de saber si pot fer-ho o no.
2.2 Agents Físics
El camp de la IAD té una gran relevància
en la robòtica cooperativa. La IAD té dues grans àrees
destudi: la resolució distribuïda de problemes (DPS) i els
sistemes multi-agent (MAS). Mentre que la recerca a DPS està relacionada
amb el problema de com resoldre un sol la problemàtica amb lús
de diversos agents, a MAS la recerca es centra en lestudi del comportament
col·lectiu dun grup dagents. De fet, la influència daquesta
recerca en la robòtica cooperativa sha vist molt limitada pel fet
que es concentra en dominis on la incertesa no és un element tant
important com ho és en el món real. De fet sha argumentat
que la IAD té poques possibilitats dèxit en la robòtica
cooperativa [11]. De tota manera cal tenir en compte que com que la tecnologia
associada al processos de percepció (sensors) i dactuació
(actuadors) milloren i que la potència dels processadors augmenta,
els resultats dalt nivell de la IAD esdevénen cada cop més
i més aplicables a la robòtica col·lectiva.
Fig. 2: Ilustració dun agent físic
Lestudi de sistemes multi-robot amb comportament col·lectiu
és molt més ampli que lestudi relacionat amb sistemes dun
sol robot. Linterés està en dos qüestions: (1) les
tasques a realitzar són molt complexes com per a ser fetes per un
sol robot, (2) encara que un sol robot pot ser molt potent, lutilització
de diversos robot més simples dóna més flexibilitat
i és més tolerant a fallades [3]. De fet, aquests sistemes
són diferents daltres sistemes distribuïts típics (processadors,
xarxes, bases de dades, Internet) perquè estan en un entorn real
i això introdueix nous paràmetres: incertesa, soroll, no-linealitats,
imprecissió.
Com a explicació informal del funcionament dun
agent físic podriem donar la següent:
Definició 2: Extensió del concepte
dagent software a agent físic. La
definició
1 i el que segueix: per saber què és possible fer i què
no, cal tenir en compte algun coneixement físic del sistema (robot
i entorn). Això significa que les entrades i les sortides físiques
cap i des de lentorn han destar integrades en la base de coneixement
de cada agent. Això és així perquè cada agent
està contingut en un cos físic que ha de controlar i moure
mitjançant de les decisions.
2.3 Agents Físics Dinàmics
Encara que el funcionament de lagent tipus físic
és correcte, no té en consideració el fet que lagent
ha de ser capaç de controlar el seu propi cos físic, és
a dir, ha de poder seguir correctament trajectòries predefinides
o perseguir i evitar obstacles. En definitiva, ha de poder realitzar qualsevol
tipus de tasca que contingui infinites situacions a causa dels canvis continus
(discrets i continus) de lentorn i a causa dels seus propis moviments
(accions). Els treballs actuals amb robots reals no avaluen la problemàtica
associada a la dinàmica del propi robot; lúnic que fan és
interpretar els problemes que apareixen des del punt de vista de la supervisió
o de la detecció de falles [1][5][13]. Per tant, aquests problemes
sanalitzen abans i no després de letapa danàlisi. De fet,
si tenim en compte que els moviments dels robots es poden descriure amb
equacions diferencials, podem concloure que la teoria de control automàtic
és necessària per a lanàlisi de la dinàmica
dels agents autònoms.
Definició 3: Extensió del concepte
dagent físic a agent físic dinàmic.
Definició 2 i el que segueix: el coneixement físic sobté
a partir de la dinàmica del cos físic, el qual es representa
de forma declarativa tant a nivell de control com a nivell de supervisió
[7]. La forma de declarar aquest coneixement és a través
de les capacitats.
2.4 Exemple il·lustratiu: dos vehicles autònoms
en fila
Quan dos vehicles han de mantenir una distància
de separació en una cua, poden aparèixer problemes de col·lisió,
sobretot quan apareixen canvis en les velocitats dels vehicles. Normalment,
la responsabilitat devitar la col·lisió recau en el vehicle
del darrera, el qual ho aconsegueix modificant el seu comportament dinàmic
accelerant o frenant tenint en compte la variació de la distància
de separació amb el del davant i el llum vermell indicatiu dinici
de frenada. Tot i així hi ha situacions en què la col·lisió
és inevitable, sobretot a causa del desconeixement de la dinàmica
de laltre vehicle.
Amb una simulació numèrica es pot veure
que, a priori, es pot preveure si hi haurà col·lisió
en una frenada a partir del coneixement de les dinàmiques dels dos
vehicles. Per fer aquesta anàlisi sutilitzaran funcions de transferència.
En una primera aproximació es considerarà un moviment rectilini
i amb velocitats dels vehicles amb comportament completament lineal (sense
canvis de marxa ni patinades a la frenada) i representable per funcions
de primer ordre. Per a poder treballar amb agents autònoms haurem
de suposar que cada vehicle disposa dun sistema de control de la velocitat
intern; suposarem que ténen el mateix sistema de control i que les
funcions de transferència GA(s) i GB(s) que
representen les velocitats en llaç tancat són de primer ordre
(les velocitats ténen un comportament exponencial). Què passa
quan posem els vehicles lun darrera de laltre? El vehicle del darrera
(sistema B) ha daconseguir que es compleixi la següent especificació:
D-(XA-XB) @ 0,
on XA i XB són les distàncies
recorregudes pels dos mòbils i D la distància a mantenir
entre ells. Com ho aconsegueix? Sense perdre generalitat, usarem un control
proporcional, és a dir, la consigna de velocitat per a B vindrà
donada per lexpressió següent: KP·(D
- (XA-XB)), on Kp és una constant
(veure "Fig. 3").
Fig. 3: Diagrama de blocs del sistema de control.
Amb una simulació daquest sistema sobserva que
la velocitat del sistema B modifica la dinàmica i passa a ser de
segon ordre. Suposem les condicions inicials D=5m, VA (t=0)=8
m/s i VB (t=0)=8 m/s, XA=5m. (els vehicles
manténen inicialment la distància D en un règim de
8 m/s). Quan el vehicle A redueix la velocitat a VA=4
m/s, sobserva un comportament de 2on ordre per al sistema B.
També pot observar-se que en aquestes condicions es produeix la
col·lisió posterior (veure "Fig 4").
Fig. 4: (a)Velocitats dels sistemes A i B, (b) Visualització
de linstant de la col·lisió.
El que pot deduir-se daquest exemple és que encara
que el sistema A tingués la possibilitat de comunicar al B la intenció
de frenar fins a 4 m/s, hauria de dir-li en quina manera ho fa. Concretament,
hauria de sumministrar-li informació sobre la seva dinàmica
de frenada: temps de frenada (temps de resposta del sistema A), possibles
oscil·lacions (ordre del sistema), velocitat final real (error en
estat estacionari), etc. De fet, per fer una frenada sense problemes caldria
una negociació entre els dos sistemes amb lús dinformació
que inclogui tant paràmetres estàtics com dinàmics
del procés.
3 Descripció de larquitectura DPA2
Larquitectura DPA2 interpretats al nivell
més baix i amb sofisticats models del món accessibles al
nivell més alt. Aquesta arquitectura utilitza un conjunt de mòduls
similars entre ells i que van connectats per canals dinformació.
Daquesta manera, el sistema de control consisteix en una cadena de mòduls,
cadascun dells usant informació amb diferent grau dabstracció
respecte dels altres. Quant als canals, serveixen per a transmetre informació
per pas de missatges, els quals es processen internament en el mòdul
fent ús de dues unitats de procés: la Unitat dIntrospecció
(IU), i la Unitat de Control (CU). Daquesta manera, i amb lús
de protocols simples de conversa, es possibilita que mòduls amb
alt nivell dabstracció puguin accedir a informació que sha
processat en mòduls de grau dabstracció més baixa.
Cal remarcar que només està permesa la comunicació
entre mòduls veïns.
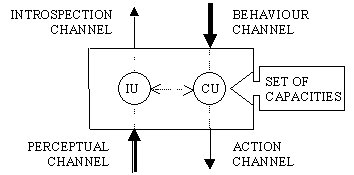
Fig. 5: Esquema dun mòdul de la DPA2
Encara que els mòduls siguin estructuralment iguals
i la forma de funcionament sigui la mateixa, ténen un nucli diferent:
un conjunt específic de capacitats. Per tant, la relació
inherent entre els comportaments i les corresponents accions es defineix
a partir dun conjunt de capacitats predefinides en el mateix mòdul.
En contraposició al que es proposa a larquitectura
purament reactiva de subsumption [2], les arquitectures amb tres
nivells inclouen comportaments referint-se als estats interns de lagent.
Els tres nivells són el controlador, el qual executa comportaments
purament reactius; el seqüenciador, el qual utilitza estats de mons
passats per tal de seleccionar quins comportaments assignar en un temps
determinat; i el deliberador, el qual fa prediccions dels estats futurs
i executa càlculs costossos en temps com els associats als algoritmes
de planificació. INTERRAP [7] és un exemple recent daquest
tipus darquitectura especialment dissenyada per a sistemes multi-agent.
A INTERRAP, el nivell més alt inclou raonament col·laboratiu
usant el model BDI [12] per tal de tenir en compte tant les intencions
com els objectius dels altres agents, i per resoldre conflictes. Una altra
arquitectura és la proposada per McWorth [6] que utilitza el model
dels Constraint-Nets com a plataforma de treball unitària
per treballar amb sistemes intel·ligents híbrids.
A les arquitectures estandards en sistemes de control,
es fa una descomposició vertical la qual sol incloure tres components:
la component de control (percepció/sensors i actuació/actuadors),
la component de supervisió (modelatge i planificació), i
la de monitorització (detecció de falles). Larquitectura
que es proposa en aquest treball intenta encabir els requeriments de les
arquitectures dels sistemes de control amb aquells de les arquitectures
per a sistemes multi-agent.
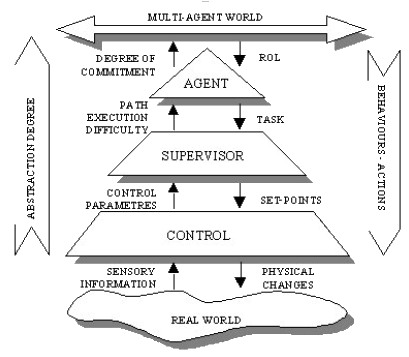
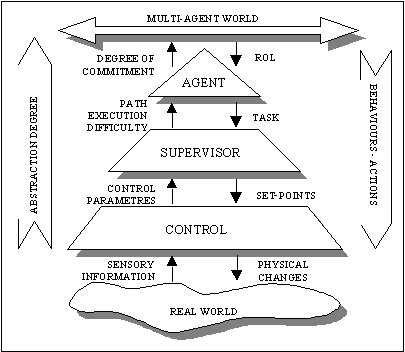
Fig. 6: Esquema de la jerarquia modular de la DPA2
En concret, DPA2 proposa lús de tres
mòduls:(veure "Fig. 6"):
Mòdul de Control: és la connexió
directa entre lagent i el món real.
Mòdul Supervisor: és la interfície
entre els paràmetres dels món real i el món lògic
de lagent.
Mòdul Agent: consisteix en ser la connexió
cap el món multi-agent. Conté la lògica de la decisió.
Com es pot veure a la "Fig. 6", a mida que el grau
dabstracció augmenta, la naturalesa dels comportaments esdevé
més sofisticada i tendeix a ser directament independent dels condicionants
que imposa el món real. De fet, la informació que es transmet
ente mòduls és cada vegada simbòlica. De forma paral·lela,
a mida que el grau dabstracció disminueix les accions es degraden
fins a consistir en simples canvis físics en els actuadors del cos
físic de lagent.
3.1 Funcionament dels mòduls
Quan el sistema de control global sinicia, el mòdul
agent ha de decidir una tasca a fer després dhaver-la negociat
amb els altres agents. La forma dobtenir-la depèn tant de paràmetres
de lentorn com dels estats interns de lagent. Els paràmetres externs
es poden obtenir a través dintercanvis dinformació via
llenguatges (protocols) de comunicació estandards entre els agents.
Daltra banda, els paràmetres interns han de poder descriure estats
del cos físic de lagent des dun punt de vista tant dalt com de
baix nivell per exemple, paràmetres de la dinàmica dun
robot mòbil. Per tant, el mode de funcionament ha de cumplir el
següent: els mòduls amb alt grau dabstracció han de
poder obtenir informació dels mòduls amb baix grau dabstracció
per tal de poder incluir-la en les decisions. És per aquest requisit
que shan definit dos modes de treball modular:
3.1.1.Mode dIntrospecció (I-mode):
El mòdul es posa en aquest mode de funcionament quan rep un missatge
de demanda query (veieu la "Fig. 7"). En aquest mode de
funcionament, el mòdul pot ajudar al mòdul amb grau dabstracció
immediatament superior a obtenir dades perceptuals de nivell més
baix. El mòdul emissor del missatge demana quin és el grau
de dificultat dexecutar una acció determinada en un temps específic
i el mòdul receptor ha de consultar el conjunt de capacitats per
tal de poder respondre a la pregunta. El mòdul contesta a través
del canal dinstrospecció i es posa en estat despera. Quan el conjunt
de capacitats no dóna prou informació aleshores el mòdul
passa a funcionar a mode de control per tal dobtenir més informació.
Tot aquest procés intern es processa amb la unitat dintrospecció.
3.1.2.Mode de Control (C-mode):
El pas a mode de control es produeix per causes externes quan el mòdul
rep un missatge de comanda request. En canvi, el pas de I-mode
a mode de control és automàtic quan al mòdul se li
ha demanat una informació relativa a un comportament i no ha pogut
trobar la informació suficient dintre del conjunt de capacitats:
en aquest cas envia un missatge de demanda query al mòdul
immediatament inferior. Daquesta manera, el mòdul pot obtenir dades
perceptuals i, aleshores, integrar-les per tal de completar les capacitats.
Un cop integrades pot tornar a I-mode i continuar el diàleg
amb el mòdul immediatament superior.
Per tant, quan el mòdul està en aquest mode
pot ordenar al mòdul immediatament inferior que iniciï lexecució
duna acció determinada (veieu "Fig. 8") o pot dobtenir-nen
informació i actualitzar les seves capacitats
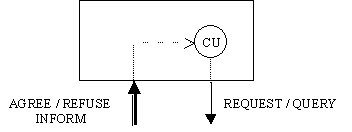
Fig. 7: Flux de dades en mode dintrospecció
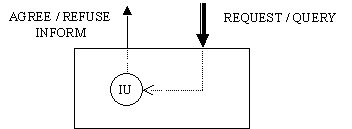
Fig. 8: Flux de dades en mode de control
3.2 Protocols de diàleg intermodular
Hem vist que els mòduls poden funcionar de dues
formes diferents, i la manera com passa duna modalitat a laltra dependrà
de les necessitats del sistema de control global. És a dir, el funcionament
de cada mòdul estarà marcat pels tipus de missatges que sintercanviarà
o que li arribaran dels mòduls veïns. També cal explicitar
el fet que la modularitat de larquitectura permet interpretar-la des dun
punt de vista diferent: enlloc de parlar de mòduls encadenats amb
estructures equivalents es pot parlar dun conjunt dagents homogenis.
Per tant, des daquest punt de vista és important especificar quin
és el protocol de diàleg intermodular (o entre agents).
Hi ha definits dos tipus generals de missatges: els dinterrupció
i els de diàleg. Els primers provoquen un canvi immediat en la modalitat
de funcionament del mòdul que el rep (són com una petició
datenció), mentre que els altres es regeixen per les regles de
diàleg que marquen els protocols.
Missatges dinterrupció (INT): Aquests missatges
provoquen un canvi en el mode de funcionament del mòdul receptor.
Més concretament, quan arriben pel canal de percepció provoca
el pas de funcionament I-mode a C-mode mentre que quan arriben
pel canal de comportament provoca el pas de funcionament C-mode
a I-mode. En el primer cas aquest tipus de missatge requereix una
atenció immediata ja que una percepció pot fer canviar una
decisió presa en un mòdul amb grau dabstracció més
alt, mentre que en el segon cas aquesta atenció ha de tenir prioritats
diferents per a mòduls diferents. Això es deu al fet que
el pas de C-mode a I-mode pot conduir a conseqüències
diferents una aturada perillosa al mòdul de control, o un canvi
de pla al mòdul supervisor.
Canal de comportament
[C-mode à I-mode] |
Canal de Percepció
[I-mode à C-mode] |
| INT Request (A, time) |
INT Inform(A,END) |
| INT Inform(A,EVN, Desc) |
| INT Inform(A,PRB, Desc) |
Taula I: Llista de missatges dinterrupció:
la primera fila indica el canal dentrada del missatge i el canvi que sindueix
en el mode de funcionament del mòdul receptor.
Missatges de diàleg: aquests són
els missatges que poden intercanviar-se entre dos mòduls veïns
i que no provoquen cap canvi directe en el mode de funcionament dambdós
fins que la conversa ha finalitzat.
| Canal de Percepció |
Canal de Comportament |
| Agree (A, time, m ) |
Request (A, START, time, m ) |
| Refuse (A, Reason) |
Request(A, STOP) |
| Inform (A, time, m ) |
Query (A, time)* |
Taula II: Llista de missatges de diàleg.
3.2.1.Descripció dels protocols
Hem vist que cada mòdul pot funcionar en dues modalitats
i que en qualsevol de les dues sempre hi ha o una comanda o una demanda,
és a dir, un mòdul pot portar a terme quatre tipus de papers
dialectals: ordenant de demanda, receptor de demanda, ordenant de comanda
i receptor de comanda. Per tant, només shan definit dos protocols:
un pel diàleg de demanda (QUERY) i un altre pel de comanda (REQUEST),
els quals estan basats en els protocols FIPA-query i el FIPA-request establerts
per la FIPA98 [4]:
Protocol FIPA-query: el mòdul receptor rep un missatge
en què se li demana que faci una acció informativa. En el
nostre cas lacció informativa serà contestar a la pregunta
formulada per lemissor.
Protocol FIPA-request: permet que un mòdul demani
a un altre que executi una acció. En cas dacceptació també
avisarà quan acabi o si hi ha hagut alguna fallada. El mòdul
receptor pot refusar lordre dexecució de lacció i donar
els motius del perquè. Aquest refús és indicatiu que
té algun problema amb les seves capacitats i, per tant, no pot executar
les accions relacionades.
3.3. Activació del sistema
A partir de lestructura de larquitectura es pot veure
que la comunicació entre mòduls pot iniciar-se des dalt
nivell quan lagent es compromet a executar un rol (activació Top-down),
o bé des de baix nivell quan el mòdul de control detecta
un event (activació Bottom-up). Aquest segon cas no sexplicarà
per raons despai.
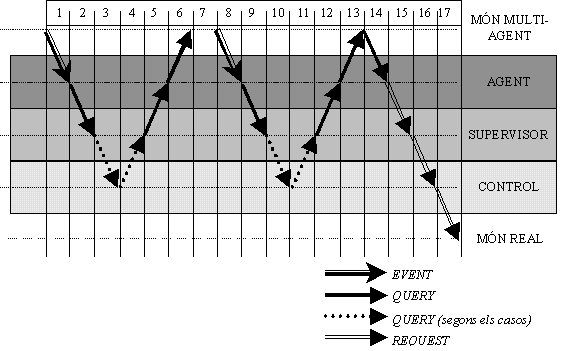
3.3.1.Activació Top-down: descripció
A continuació sexplica el funcionament a partir
de lesquema de la "Fig.9":
Cal comentar que en el cicle de funcionament
sha posat un quart mòdul corresponent a la col·lectivitat
en què es mou lagent. Com es pot veure aquest seria un quart mòdul
que apareix a larquitectura DPA2 de forma natural (veure també
"Fig. 6"): la percepció que té la col·lectivitat
de lagent és el grau de compromís que adquireix en acceptar
un rol. Sha posat a la taula per raons de claretat: el temps de cicle
per obtenir una decisió depèn també del temps que
dedica lagent a negociar amb la col·lectivitat.
3.4 Definició de les capacitats modulars
Com poden definir-se les capacitats dun agent? Tot depèn
del nivell dabstracció a què es treballi. Per obtenir una
definició amb poca ambiguïtat cal basar-la en un llenguatge
descriptiu numèric de forma que cal començar als nivells
baixos dabstracció i anar augmentant el grau dabstracció
per anar passant a descripcions més simbòliques. De fet,
una raó de pes per començar a definir les capacitats a baix
nivell està en el fet que tot agent físic disposa duns controladors
que el limiten i/o capaciten per executar una certa quantitat daccions
duna forma més o menys correcte. És a dir, el món
lògic de lagent ha de saber si serà capaç de controlar
el seu cos per tal dassumir un rol concret per a la comunitat multi-agent.
De tota manera, a la literatura poden trobar-se moltes definicions de les
capacitats a nivell agent, però no ténen en compte aquest
contacte amb el món físic.
Una forma breu de definir les capacitats a nivell de control
és la següent:
Definició 4: una capacitat (a nivell
de control), consisteix en ser la percepció
de les qualitats dun controlador. Per tant, les capacitats integren tant
la identificació del cos físic com la percepció de
lentorn a través del cos i, en última instància,
integren també ladaptació de lagent físic a lentorn,
és a dir, lhabilitat de poder aprendre.
Per tal de formalitzar la definició de les capacitats,
anomenem les capacitats de control com a capacitats atòmiques,
que són aquelles que lacció associada pot executar-se directament
amb la percepció i lactuació del nivell més baix,
sense interpretar les dades adquirides. És a dir, lacció
es portarà a terme a partir de la mesura de les coordenades generalitzades
del propi cos  ,
i dels events i les magnituds externes al cos mesurades amb els sensors
del propi agent. Per tant, la definició de les capacitats atòmiques
sha de fer observant la qualitat dexecució daquestes accions
amb els diferents controladors implementats en el cos fisic, és
a dir, mesurant lerror en estat estacionari, el temps de resposta, lamplitud
doscil·lació, etc. Cal tenir present que el grau de sensorització
és indicatiu del grau dautonomia de lagent, és a dir, serà
capaç de realitzar més accions i, per tant, tindrà
més capacitats.
,
i dels events i les magnituds externes al cos mesurades amb els sensors
del propi agent. Per tant, la definició de les capacitats atòmiques
sha de fer observant la qualitat dexecució daquestes accions
amb els diferents controladors implementats en el cos fisic, és
a dir, mesurant lerror en estat estacionari, el temps de resposta, lamplitud
doscil·lació, etc. Cal tenir present que el grau de sensorització
és indicatiu del grau dautonomia de lagent, és a dir, serà
capaç de realitzar més accions i, per tant, tindrà
més capacitats.
Les capacitats del supervisor sanomenen capacitats
bàsiques, i són aquelles que sobtenen combinant les
atòmiques. El mètode de combinació consisteix en utilitzar
les capacitats atòmiques com a estats en una màquina destats
finits, i en utilitzar les condicions que obliguen a abandonar un controlador
i escollir-ne un altre com a transicions. En un llenguatge més formal,
el mètode de combinació consisteix en construir un sistema
de control híbrid. Cal fer notar que el supervisor pot utilitzar
un llenguatge menys numèric i això fa obligatori lús
detiquetes, és a dir, com que el nivell dabstraccio és
més alt linterpretació del món és més
depenent de laplicació. Això provoca que pugui haver-hi
accions bàsiques que siguin coincidents en la combinació
daccions atòmiques, però no en letiquetat que utilitzen.
En aquest mòdul supervisor, lavaluació
de la qualitat dexecució daquestes accions és més
complexa ja que el llenguatge descriptiu no és tant numèric
com en el nivell dabstracció del mòdul de control. De tota
manera, amb mètodes heurístics es pot avaluar la precisió
i/o la dificultat de les execucions de les accions. Per exemple, es pot
avaluar lexecució de lacció (A) calculant un índex
del grau de dificultat en funció de les oscil·lacions de
la trajectòria optimitzada [10].
Finalment, les capacitats a nivell agent es defineixen
de forma més simbòlica ja que el model del món és
molt més abstracte i és completament dependent de laplicació
que es faci. El mètode de definició és completament
escalable al que sutilitza en el supervisor, és a dir, les capacitats
en el nivell dabstracció del mòdul agent és construeixen
a partir de les capacitats bàsiques. De tota manera, lobjectiu
del mètode de combinació no és construir un sistema
de control híbrid, sinó construir una màquina destats
finits en què els estat són accions bàsiques i les
transicions són les condicions que afavoreixen o no el manteniment
de lexecució dun acció bàsica concreta.
4 Exemples il·lustratius
4.1 Dos vehicles autònoms en fila
La situació que teniem a la secció 2.4 era
que el vehicle guia normalment decidia accelerar o frenar sense tenir en
compte la dinàmica de laltre vehicle. Proposem la creació
dun sistema de decisió co-operant que tingui en compte les dinàmiques
de frenada dambdós vehicles [8][9]. Amb aquest exemple no sintenta
trobar un mètode per solucionar el problema de les col·lisions
en les formacions en fila india, sinó que sha escollit aquest problema
perquè ofereix la problemàtica de la dinàmica dels
mòbils: en una cua no hi haurà mai dos vehicles exactament
iguals de forma que la forma de la frenada serà diferent en cada
cas.
Per tal poder usar la DPA2, en el mòdul
de control shan definit un conjunt de controladors que permeten obtenir
diferents temps de frenada. En el mòdul supervisor shan definit
les capacitats a partir de la classificació del tipus de resposta
que sobté per a cada controlador. Finalment, en el mòdul
agent shan definit només les capacitats de frenar, accelerar i
mantenir la velocitat. Així, lagent pot adquirir el compromís
de frenar en un temps determinat a partir de la percepció que rep
del mòdul supervisor. Per tant, els dos agents poden acordar lacció
de frenada suficient per a tots dos de forma que, tot i que la dinàmica
de (XA-XB) continua sient de 2on
ordre, el xoc seviti.
A continuació es presenta un exemple amb la decisió
cooperant explicada anteriorment, en què lagent A decideix parar
amb t
=0.3s. Després que lagent B inhibeixi lexecució,
negocien un valor t
=0.6s. Es pot observar que la distància
no sanul·la, és a dir, sevita la col·lisió
(veure "Fig.11").
El que es pot veure amb aquest exemple és que lenginyer
que ha de dissenyar lagent físic amb dinàmica pròpia,
sha de dedicar fonamentalment a definir les capacitats de cada mòdul.
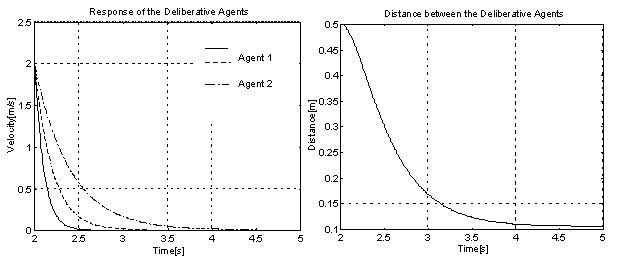
Fig.11: Diagrama de la frenada (esquerra), i evolució
de la distància XA-XB.(dreta).
Daquesta manera, la forma de treballar queda modularitzada
i pot dedicar-se, posteriorment, a establir les relacions que hi ha entre
les capacitats i les accions en cada nivell dabstracció.
4.2 Equip de robots jugant a futbol
A fi de poder completar la definició de larquitectura
sestà portant a terme el desenvolupament dun exemple daplicació
molt més complert: una plataforma real amb un equip de robots que
juguen a futbol. La riquesa daquesta plataforma està en la quantitat
de problemàtiques que apareixen: en control (no-linealitats, imprecissió),
en supervisió (seguiment de trajectòries, canvis de controladors
segons les situacions), per lagent (obstruir, passar la pilota), per la
col·lectivitat (atacar, defensar, negociar i resoldre de conflictes).
A partir del coneixement aproximat del joc del futbol
és fàcil entendre que tant a baix nivell dabstracció
(mòdul de control) com a al nivell (mòdul agent i/o col·lectivitat),
la definició de les capacitats ha de ser molt més elaborada
que en lexemple anterior. En el mòdul de control cal definir-hi
diversos tipus de controladors per tal que lagent pugui executar moviments
diferents tant en precissió com en rapidesa. Aquests controladors
hauran destar pensats per a executar cadascun dells accions que en el
mòdul supervisor són, simbòlicament, molt diferents:
anar a un punt llunyà, xutar, buscar la pilota amb ajuda de sensors,
obtenir una posició i orientació acurades, etc.
Per concretar més, anem a definir les accions atòmiques.
A partir de la mesura de les coordenades del propi cos i de les magnituds
externes al cos, algunes accions atòmiques podrien ser (1) anar
a una posició, (2) mantenir una velocitat, (3) perseguir un
objecte, (4) evitar el xoc amb un objecte o (5) colpejar un objecte.
Hem de suposar que tenim definit un conjunt de controladors.
Com a accions bàsiques podriem definir les següents:
(A=(1+2+4)) anar de A a B seguint una trajectòria, (B=(1+2+5))
xutar la pilota, (C=(1+2+3)) portar la pilota, (D=1+2+3) perseguir
un contrari, o(E=1+2+3+4) moures seguint la paret. Respecte a les accions
C i D. Es pot veure que són coincidents en la combinació
daccions atòmiques, però no en letiquetat que utilitzen.
En la primera letiqueta de lobjecte correspon a pilota mentre que en
la segona és contrari.
Finalment, les capacitats a nivell agent es poden definir
com segueix: Passar la pilota, Marcar un contrari, Protegir la porteria,
Desmarcar-se o Interceptar la pilota.
5. Conclusions i treballs futurs
En aquest treball sha presentat una arquitectura per
a agents físics amb dinàmica pròpia. Un agent és
vist com a una entitat multi-nivell i uniforme en el sentit que els diferents
mòduls que el componen interaccionen i funcionen duna manera uniforme.
La diferenciació bàsica entre els mòduls està
en la definició de les capacitats. Des daquest punt de vista, els
mòduls poden considerar-se com a agents en sí mateixos. En
aquest treball encara queden qüestions obertes de les quals remarquem:
-
Com integrar nous nivells en un agent ja existent?
-
Com pot lagent tenir coneixement del seu propi cos i ser
conscient de les limitacions que té?
-
Com introduir informació més complerta de la
dinàmica del cos com les no-linealitats o la imprecissió?
-
Incloure el mòdul de la col·lectivitat i introduir-hi
lescena electrònica com a eina per a facilitar el disseny de sistemes
multi-agent.
Agraïments
Aquest treball ha estat parcialment finançat pel
projecte CICYT TAP98-0955-C03-02 "Diseño de agentes físicos
(DAFNE)" del MEC i per 1998GR00234 "Grup de Recerca Consolidat de Sistemes
Integrats" del CUR.
Referències
[1] R.Beckers, O.E.Holland, and J.L.Deneubourg. From Local
to global tasks: Stigmergy and collective robotics. Proc. A-Life IV.
MIT Press, 1994.
[2] R.A. Brooks. A robust layered control system for a
mobile robot. IEEE Journal of Robotics and Automation, RA-2:14-23,
1986.
[3] Y.U.Cao, A.S.Fukunaga, et al. Cooperative Mobile Robotics:
Antecedents and Directions. IEEE Transactions in Robotics.
pp. 226-234. 1995.
[4] FIPA98 Draft Specifications: Part 1. This version
may be found on the FIPA web site: http://www.fipa.org
[5] McFarland. Towards robot cooperation. Proc. Simulation
of Adaptive Behavior, 1994.
[6] A.K.MackWorth. On Seeing Robots. Computer Vision:
Systems, Theory, and Application. Pp 1-13, World Scientific Press,
Singapore, 1993
[7] J.P.Müller. The Design of Intelligent Agents.
A Layered Approach. Lecture Notes in Artificial Intelligence, Vol.
1177. Ed. Springer-Verlag. 1996.
[8] A.Oller, E. Del Acebo, J.Ll. de la Rosa. DPA2:
Architecture for Co-operative Dynamical Physical Agents. Acceptat al 9th
European
Workshop on Multi-Agent Systems MAAMAW 1999.
[9] A.Oller, J.Ll. de la Rosa, B. Innocenti. Uso de parámetros
dinámicos para mejorar la cooperación entre robots móbiles.
Aplicación en un convoy de dos robots. Acceptat a Seminario Anual
de Automática y Electrónica Industrial 1999 (SAAEI99).
[10] A. Oller, J.Ll. de la Rosa, R. García, J.A.
Ramon, A. Figueras Micro-Robots Playing Soccer Games: a Real Implementation
Based on a Multi-Agent Decision-Making Structure. International Journal
on Intelligent Control and Soft Computing. En premsa. 1999.
[11] L.Parker. Heterogeneous Multi-Robot Cooperation.
PhD. Thesis. MIT EECS Dept. February. 1994.
[12] A.S. Rao and M.P. George_. BDI agents: From theory
to practice. In Proceedings of the First International Conference on
Multi-Agent Systems (ICMAS-95), pp. 312-319, Menlo Park, California,
June 1995. AAAI Press. (pp. 101, 184, 185, 195, 199).
[13] L.Steels. A case study in the behavior-oriented design
of autonomous agents. Proc. Simulation of Adaptive Behavior, 1994.