Autor: Miquel Montaner Rigall
Tutor: Josep Lluís de la Rosa i EstevaDepartament dElectrònica, Informàtica i Automàtica
1 Objectius:
2 Agents sobre SoccerServer 5.24
- Implementació dun sistema de decisió cooperativa basat en lògica difusa i consensus
- Aplicació de sistemes de decisió al món del futbol
- Implementar un sistema multi-agent sobre la plataforma SoccerServer
- Participar a la Robocup99
- Plataforma de proves (sistemes de decisió, estratègies de joc, ...)
- Tenir un entorn simulat sobre el qual analitzar el comportament dels robots reals
- Realitzar una documentació que serveixi com a base per futurs projectes
- Extracció de conclusions teòriques
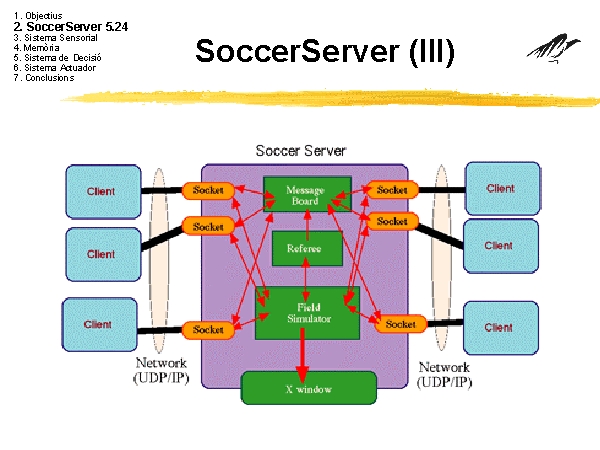
- Programa servidor executat en una màquina servidora preparat per simular un partit de futbol
- Aporta un camp de futbol virtual, jugadors i pilota i simula tots els seus moviments
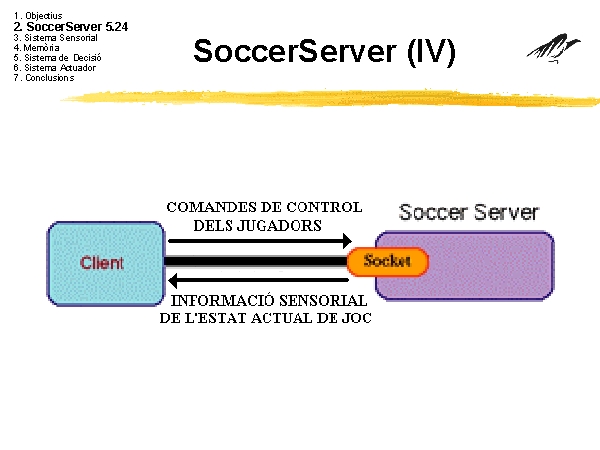
- Els jugadors es controlen mitjançant programes client que es connecten al servidor via socket
- Un equip de futbol està format per 11 jugadors implementats com agents (plataforma multi-agent)
- Inclou característiques de problemes que actualment les investigacions sobre intel·ligència artificial estan tractant, com ara processament en temps real, robustesa enfront del soroll, cooperació en sistemes multi-agent i processament dinformació incompleta
- El soccermonitor és un programa client que mostra en una finestra X-Windows el partit
- 5.24 és la versió per jugar la Robocup99
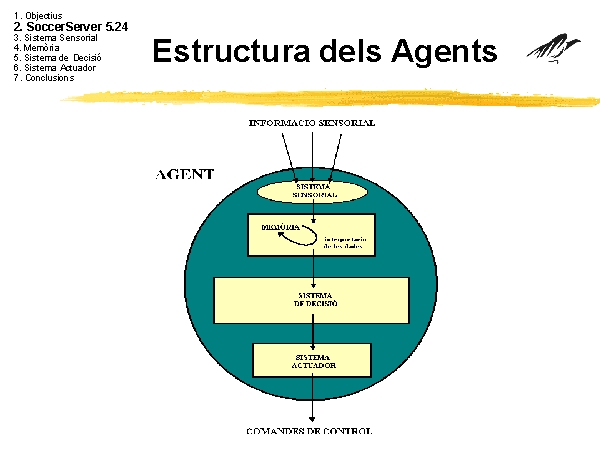
Informació Visual
Informació Auditiva
Informació de Sensació Corporal- La informació pot arribar de làrbitre:
- Decisions arbitrals (ex: falta, fora de joc, ...)
- Play Modes (ex: xut lliure, xut de porteria, ...)
- o daltres jugadors del meu equip (missatges)
- Condicionarà el sistema de decisió dels agents
4 Memòria
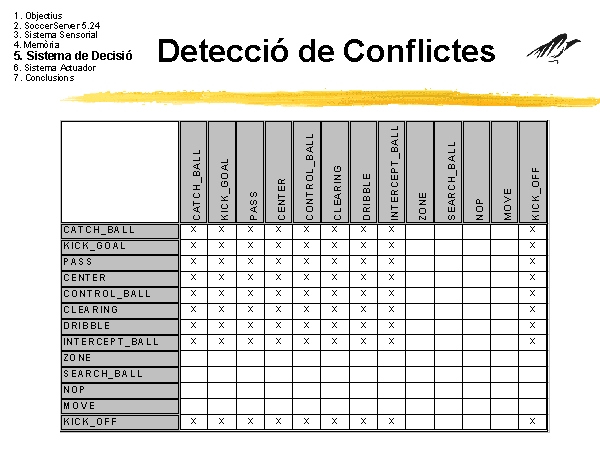
5 Sistema de decisió
Presa de decisions en 3 passos:
Decisió Reactiva

Decisió Deliberativa
6 Sistema actuador
7 Conclusions i treballs futurs


