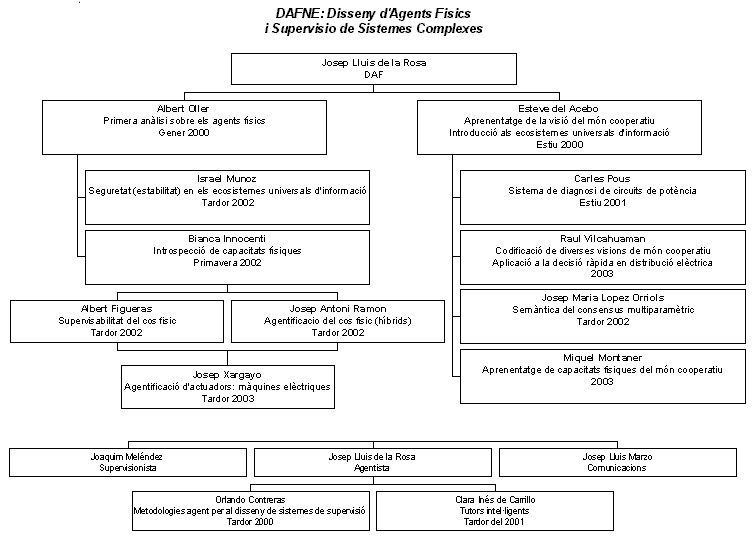
1. Albert Oller. Presentación del problema de la dinámica en los agentes físicos y propuesta de arquitectura para ayuda de los ingenieros de control en el diseño de agentes físicos. Parece que las especificaciones de la FIPA convenientemente adecuadas al perfil de los robots futbolistas pueden dar cuerpo a este tópico.
2. Esteve del Acebo. Aprendizaje de la visión del mundo cooperativo. A partir de estudiar aspectos de decisión basada en la teoría de consensus, se estudia la manera de superar el problema de la asignación de los parámetros de consensus vía interpretación semántica de dichos parámetros conjuntamente con asignación a priori mediante medidas de la calidad de bases de conocimiento fuzzy, o bien alternativamente con algún algoritmo de evolución tipo genético que pueda garantizar el optimo (aunque solo probabilistamente). A continuación agentificará dicho tipo de decisión basada en consensus y la aplicara en un ejemplo de ecosistema de información universal, en su dimensión de población de agentes físicos. Para ello incluirá la noción de capacidad. Finalmente se requiere de un lenguaje orientado a agente para representar dicha agentificación del consensus.
3. Bianca Innocenti. Obtención de capacidades del mundo físico: introspección. Benchmarks que muestren la utilidad de los modelos de introspección de capacidades físicas. Parece que las técnicas de CBR pueden aportar significativamente a este objetivo.
4. Miquel Montaner. Obtención de las capacidades del mundo físico: aprendizaje a partir de las introspecciones del mundo cooperativo y modificación de la visión del mundo cooperativo. Parece que las técnicas de CBR, aprendizaje neuronal y de genéticos interpoblaciones pueden aportar significativamente a este tópico.
5. Josep Antoni Ramon. Agentificabilidad del cuerpo físico: supervisión que garantice la coherencia de los controladores y explique a los niveles de cooperación las decisiones físicamente realizables dentro del conjunto de controladores que dispongan previamente sintetizados dentro de cada cuerpo físico. Parece que las técnicas de sistemas híbridos pueden aportar significativamente a este tópico.
6. Albert Figueras. Supervisabilidad automática de los controladores del cuerpo físico: para favorecer la supervisión y en consecuencia, disponer de un conocimiento preciso de las capacidades físicas del cuerpo físico. Todavía no esta claro, pero parece que controladores del tipo natural, o bien predictivo, bien intervalares, u otros por decidir, pueden dar pistas para solucionar este problema. El CBR puede aportar ideas de como orientar los aspectos de realizabilidad técnica de la Supervisabilidad. Los trabajos de Samaan i los previos de los 60 sobre controlabilidad y observabilidad pueden dar el marco teórico adecuado para encarar el trabajo.
7. Josep Xargayó. Dar un paso mas hacia cerrar el lazo de supervisión de forma segura y por tanto crear la agentificación de los actuadores, en este caso maquinas eléctricas de potencia no pequeña. Hasta ahora se ha hablado de los sensores inteligentes y de su valor añadido; ahora hablaremos de los actuadores inteligentes con también su valor añadido. En este caso esta tesis no será más que una versión en maquinas eléctricas de los agentes físicos que prototipamos con robots móviles autónomos y cooperantes.
8. Carles Pous. Aplicación combinada de múltiples algoritmos basados en diversos principios: diccionarios de fallos, algoritmos basados en la imprecisión, clasificadores diversos, etc. Entonces se crea un fault-manager que a una las virtudes de dichos algoritmos. Dicho fault manager se construye a partir de los principios del consensus. Finalmente se proporcionan aspectos metodológicos para dicha forma de trabajar y ejemplos de diagnostico/supervisión de circuitos de potencia que soporten chips MCM.
9. Raúl Vilcahuamán. Aplicación combinada de múltiples algoritmos basados en diversas heurísticas para la ayuda en la decisión de fallos de distribución eléctrica en la red peruana. Las heurísticas son necesarias puesto que aunque el problema tiene solución optima, su complejidad del problema origina algoritmos de gran complejidad temporal. Como que la decisión se debe realizar en pocos segundo o algún minuto entonces algoritmos basados en heurísticas son la solución mas adecuada aunque no fiable del todo. Para mejorar dichos algoritmos apliquemos el consensus. Y para mejorar el consensus procederemos a la captura automática de la visión del mundo cooperativo (compuesto por los diverso algoritmos) por parte de cada operario. Finalmente completaremos el estudio con la combinación explícita de las visiones de varios operarios.
10. Josep Maria López Orriols. Semánticas de los parámetros del consensus. Consensus multiparamétrico. Estudios comparados de los algoritmos de consensus actuales. Utilidad en la adquisición de conocimiento. Creo que es suficientemente teórico y se podría hacer en cooperación con Vicenç Torra.
11. Israel Muñoz. Ecosistemas Universales de Información. El ecosistema software impacta en el ecosistema físico (hardware) creando nuevos estados iniciales (sensibilidad del mundo físico). A su vez, el ecosistema físico impacta creando nuevos eventos que dificultan, si no bloquean, la actividad del ecosistema software. Un ejemplo de dicho ecosistema es: comercio electrónico (ecosistema software) + distribución automática (ecosistema hardware). Los aspectos interesantes (y novedosos) a estudiar son la estabilidad (robustez o sensibilidad) de un tal ecosistema, donde es muy importante que sea seguro y por tanto estable/robusto. Habrá que definir la estabilidad de un tal sistema, cosa que puede requerir de aspectos de la teoría de autómatas combinado con la de sistemas dinámicos.
12. Orlando Contreras. Metodologías Agente para el diseño de sistemas de Supervisión. Esta tesis está prevista de acabar antes del 2001.
13. Clara Inés Pena de
Carrillo. Tutores inteligentes para sistemas educativos. Prevista
en 2001. Co-dirección con Josep Lluís Marzo.