Cooperación entre robots
basada en un planteamiento multi-agente
con herramientas CACSD
A. Oller, R. García, J.A. Ramón, A. Figueras, y J.Ll. de la Rosa
Grup dEnginyeria de Sistemes y Automàtica, eXiT Group
Institut dInformàtica i Aplicacions (IIiA)
Associated European Laboratory - Intelligent Systems and
Applied Control (LEA-SICA)
Univesitat de Girona
{oller, rafa, josepa, figueras, peplluis}@ eia.udg.es

Planificación de trayectorias
Ejemplo con cuatro obstáculos
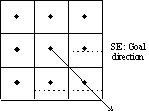
Sólo se busca entre las celdas
en gris para la dirección SE
Cooperación
(b) AGENT-0
2. Otra de tipo INFORM con las consignas de movimientos
BEL ( AgentX, DPB, ZONE2) Þ