Aquest programa sencarrega de realitzar el seguiment dels robots i de la pilota i comunicar-se amb el programa de control per tal denviar-li les posicions daquests. També permet configurar el sistema i accedir als programes WinDelimit i WinMagTrack que permetran acabar de configurar el sistema.
1.- Descripció general:
Primer de tot ens hem dassegurar que tenim configurades correctament
les opcions que fan referència als límits del camp (en cas
de voler realitzar modificacions utilitzar laplicació WinDelimit)
i les que fan referència als colors a detectar (per realitzar canvis
utilitzar WinColors).
Per posar en funcionament el programa i poder utilitzar-lo shan de
seguir els passos que sexpliquen en el manual Inicialitzacio
del Sistema de Visio. Un cop shan realitzat els passos que sindiquen
en el manual, el sistema està preparat per poder utilitzar-se per
jugar.
2.- Barra de Menús:
- Sistema:
·
Gestió del Sistema: obre un diàleg (Figura 1)
on es pot configurar les prioritats i veure el rendiment del sistema. Canviar
les prioritats del sistema pot provocar que el sistema deixi de funcionar,
per tant millor no modificar les prioritats.

Figura 1
· Opcions del Sistema: obre un diàleg (Figura 2) on es pot configurar les opcions de lequip, la mida del terreny de joc, els filtres,...
Les opcions que en cas de ser necessari es poden modificar són:
· Nombre de robots a identificar: número
màxim que el sistema de visió intenta identificar (Tenir
en compte que només sidentifica els patchs de l1 al Nombre
de robots a identificar).
· Nombre de robots contraris: com el cas
dabans però pels robots contraris.
· Color didentificació pel Rogi Team:
· Color dequip dels robots contraris:
· Port del Socket: port que sutilitza per
la comunicació amb el programa de control, en els dos programes
ha de ser el mateix port.
· Longitud del camp en X: mida del camp en
X en mil·límetres.
· Longitud del camp en Y: mida del camp en
Y en mil·límetres.
La resta dopcions es recomana no modificar-les.
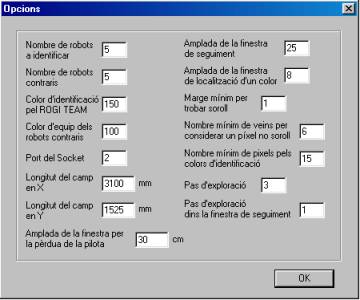
Figura 2
· Calibració de la Camera: obre un diàleg (Figura 3) on sensenyen els paràmetres de calibració i es permet calibrar la camera.
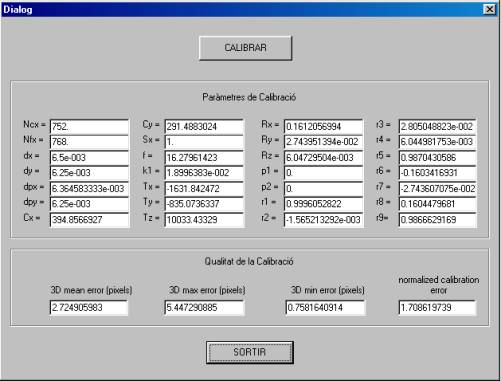
Figura 3
·
Executar WinMagTrack: executa laplicació WinMagTrack.
·
Exit WinMagTrack: tanca laplicació WinMagTrack.
·
Executar WinDelimit: executa laplicació WinDelimit.
·
Exit WinDelimit: tanca laplicació WinDelimit.
·
Sortir: surt del programa.
- Vídeo:
·
Mostrar: mostra el que està capturant la camera.
·
Tancar: tanca la finestra on es mostra el vídeo.
·
Activar/Desactivar: activa/desactiva la visualització del vídeo.
·
Play: la camera comença a capturar imatges.
·
Stop: la camera para de capturar imatges.
- Seguiment (*):
·
Inici/Fi: activa/desactiva el seguiment dels robots propis per tal
de detectar la seva posició.
·
Seguiment Contraris: activa/desactiva el seguiment dels robots contraris
per tal de detectar la seva posició.
·
Identificació Jugadors: detecta, a partir del patch, el número
de jugador del robot (en la finestra on es mostra la imatge, al costat
de la creu que indica la posició del robot apareix el seu número
(1-5)).
·
Eliminació Soroll: elimina el soroll que pugui haver a la imatge
alhora de segmentar la imatge.
·
Transmissió Dades: activa la transmissió de dades amb
el programa de control per tal de comunicar les posicions.
·
Filtre dordre 1: aplica un filtre dordre 1.
·
Filtre de Kalman: aplica un filtre Kalman.
·
Predicció Pilota: fa la predicció de la trajectòria
de la pilota.
- Veure:
·
Barra deines: mostra la barra deines.
·
Barra destat: mostra la barra destat.
- Finestra (*):
·
Nova Finestra: obre una nova finestra.
·
Cascada: mostra totes les finestres obertes en cascada.
·
Mosaic: mostra totes les finestres obertes com un mosaic.
·
Organitzar Icones: organitza les finestres minimitzades de les imatges.
- Ajuda:
·
Crèdits de WinSPIM...: informació del creador de laplicació.
(*) Aquests menús només es mostren en el cas de que
sestigui visualitzant una imatge de camera.
3.- Barra dEines:
En la barra deines trobem algunes de les opcions del menú més utilitzades:

(1): Video -> Mostrar
(2): Sistema -> Gestió del Sistema
(3): Sistema -> Opcions del Sistema
(4): Video -> Play
(5): Video -> Stop
(6): Video -> Activar/Desactivar
(7): Sistema -> Executar WinMagTrack
(8): Sistema -> Executar WinDelimit
(9): Seguiment -> Inici/Fi
(10): Seguiment -> Seguiment Contraris
(11): Seguiment -> Identificació Jugadors
(12): Seguiment -> Eliminació Soroll
(13): Seguiment -> Transmissió Dades
(14): Seguiment -> Filtre dordre 1
(15): Seguiment -> Filtre de Kalman
(16): Seguiment -> Predicció Pilota
(17): Dades Anòmales
(18): Límits Pilota
(19): Ajuda à Crèdits de WinSPIM
4.- Solució de Problemes:
- Arxius necessaris:
Laplicació al executar-se intenta llegir els fitxers que es
comenten a continuació, en el cas que no els trobi sortirà
un missatge per pantalla indicant que no els pot obrir. Tot i això
laplicació funciona correctament sense aquests fitxers.
·
Results.txt:
arxiu necessari per eliminar la distorsió radial de la camera.
· Seg.dat: en aquest fitxer es guarden per cada color que
shagi identificat (amb laplicació WinColors)
les seves components HSL màximes i mínimes.
· Param2.dat: fitxer on es guarden les dades de la regió
marcada en laplicació WinDelimit
i que indica els límits del rectangle que engloba el camp.
· WinDelimit.exe: arxiu necessari per lexecució de
laplicació WinDelimit.
· WinMagTrack.exe: arxiu necessari per lexecució
de laplicació WinMagTrack.
· WinSPIM.cfg: arxiu on sespecifica el nom i la ruta
dels arxius necessaris per laplicació.
· HSL.dat.
- El sistema no identifica algun jugador:
Quan el sistema deixa de detectar algun jugador el que sha de fer
és:
1.- Desactivar la identificació
de jugadors.
2.- Desactivar el seguiment
dels jugadors.
3.- Activar el seguiment
dels jugadors.
4.- Activar la identificació
de jugadors.
Repetir aquests passos fins que la identificació dels jugadors
sigui la correcta.